در حال حاضر محصولی در سبد خرید شما وجود ندارد.

کنترل کننده های ROS را برای سینماتیک رو به جلو و معکوس برای مسیر بنویسید و از ابتدا دست سازهای روباتیک بسازید
عنوان اصلی : ROS Ultimate guide for Custom Robotic Arms and Panda 7 DOF
سرفصل های دوره :
الگوریتم های بازوی روباتیک و تنظیم ROS:
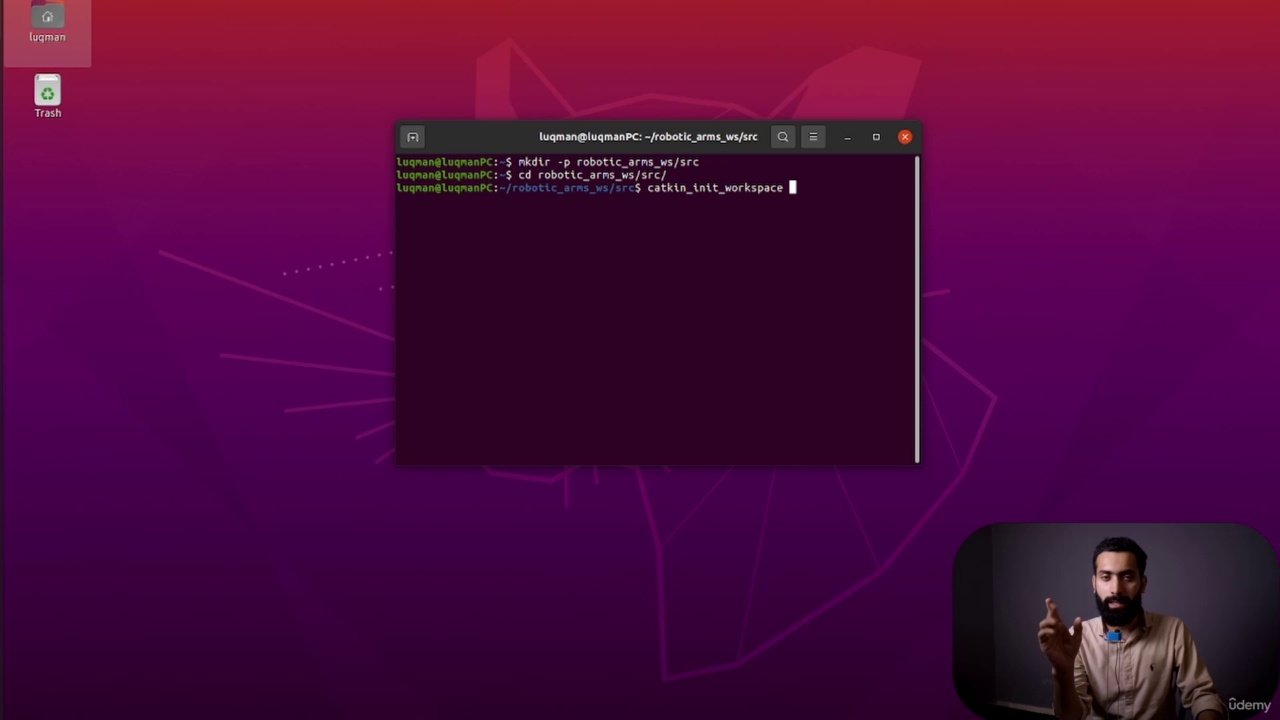
گردش کار پروژه ROS برای بازوی روباتیک سفارشی
نصب ROS و موارد ضروری راه اندازی مسیر
نصب ROS NOTETIC
فضای کاری و بسته ها چیست
بسته بندی سفارشی "Bazu"
ایجاد بازوی روباتیک سفارشی "Bazu":
درک الزامات طراحی بازوی روباتیک
برای بازوی رباتیک سفارشی ما URDF را شروع کنید
تکمیل ساختار اساسی URDF
بین پیوندها و اتصالات تغییر دهید
پرونده راه اندازی RVIZ و تست محور مشترک
راه اندازی و راه اندازی Gazebo
خصوصیات مورد نیاز Gazebo
مقادیر اینرسی لینک های مرجع
همه ارزشهای بی تحرکی و برخورد
کنترل کننده های ROS برای اتصالات اسلحه روباتیک:
بسته کنترل ROS و ویژگی های آن
مراحل نصب کنترل کننده ها با تفاوت های فضاهای سه بعدی
نصب های لازم برای سخنرانی های آینده به درستی کار می کنند
ادغام رابط های سخت افزاری در ربات سفارشی ما
مشکلات تنظیم کنترل کننده حل
کنترل کننده های تلاش
تنظیم کنترلر مسیر مشترک
جعبه ابزار رباتیک
مشتق جدول DH برای PUMA 560
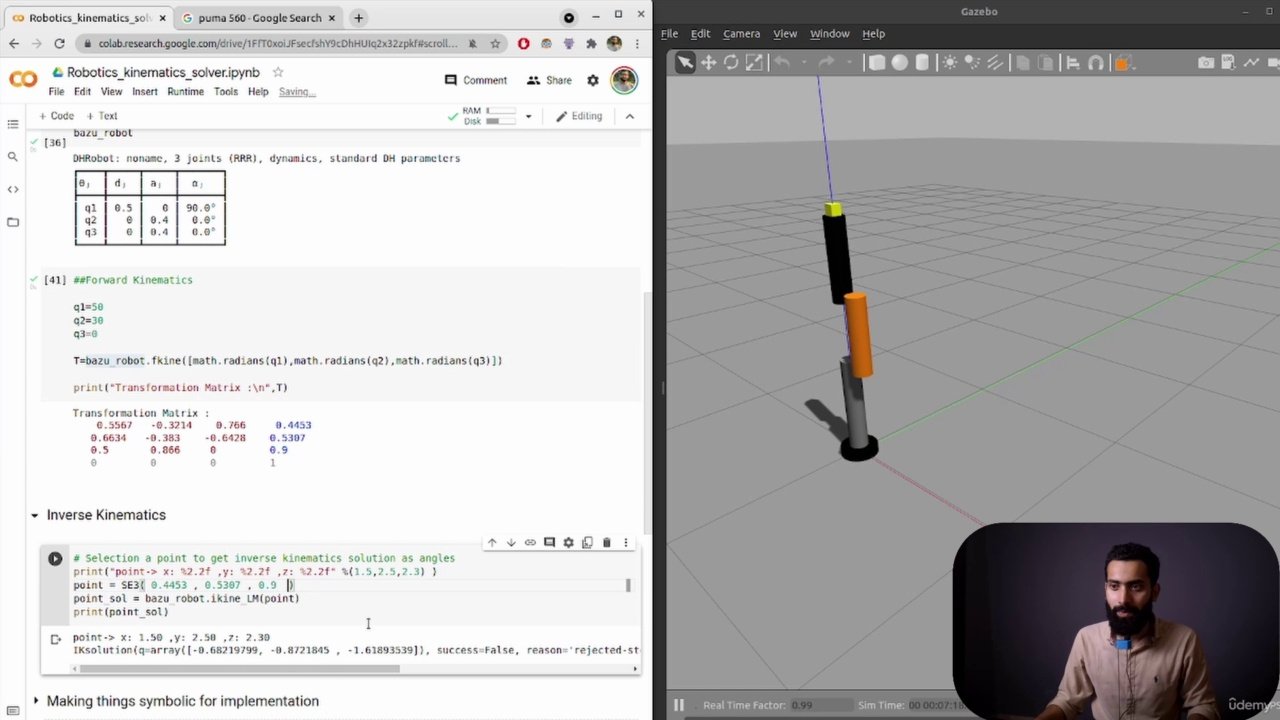
سینماتیک معکوس و رو به جلو برای PUMA 560 با استفاده از جعبه ابزار رباتیک
به دست آوردن جدول DH برای بازوی روباتیک سفارشی ما
Franka Emika Panda 7 DOF بازوی روباتیک:
چرا بازوی پاندا راتیک جالب است؟
پیوندهای مرجع به توسعه بازوی روباتیک پاندا
تنظیم بسته پاندا از مخزن
تنظیم کنترل کننده مسیر مشترک
قدرت jtc
جدول Panda DH از جعبه ابزار رباتیک
سینماتیک معکوس و رو به جلو برای پاندا با استفاده از جعبه ابزار روباتیک
اجرای نقطه سینماتیک معکوس در فضای سه بعدی
رابط مشتری اقدام مسیر
اجازه می دهیم با ربات ما یک مربع بکشیم
وظیفه برداشت یک فنجان
نسخه قدیمی این دوره در ROS Kinetic:
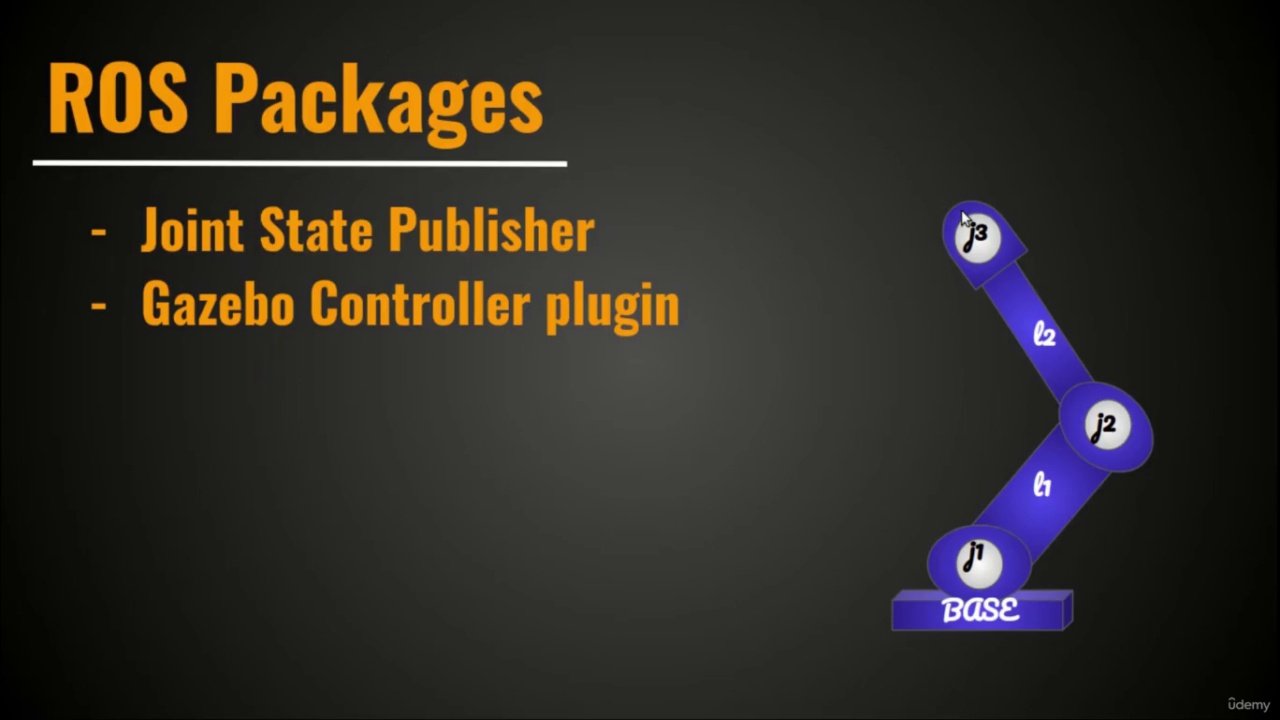
بسته های ROS
مقدمه مربی در فصل
ساختار برنامه نویسی Robot Part_2: ساخت آرنج
ساختار برنامه نویسی Robot Part_3: ساخت پنجه
مقدمه مربی در فصل
ساخت کنترل کننده بازوی ربات برای شبیه سازی های دنیای واقعی
با استفاده از کنترلر در شبیه سازی Gazebo
مقدمه مربی در فصل
تنظیم بسته های سفارشی و Moveit
ROS Ultimate guide for Custom Robotic Arms and Panda 7 DOF
در این روش نیاز به افزودن محصول به سبد خرید و تکمیل اطلاعات نیست و شما پس از وارد کردن ایمیل خود و طی کردن مراحل پرداخت لینک های دریافت محصولات را در ایمیل خود دریافت خواهید کرد.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}