در حال حاضر محصولی در سبد خرید شما وجود ندارد.
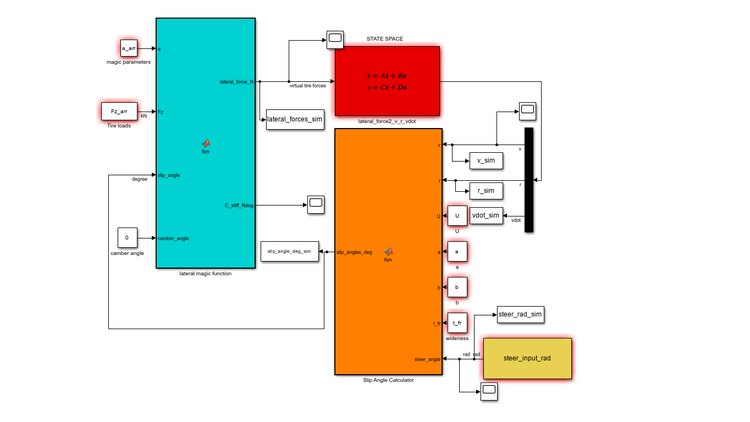
In this course you will learn basics of vehicle dynamics, forming state space matrices and simulating vehicle behavior.
در این روش نیاز به افزودن محصول به سبد خرید و تکمیل اطلاعات نیست و شما پس از وارد کردن ایمیل خود و طی کردن مراحل پرداخت لینک های دریافت محصولات را در ایمیل خود دریافت خواهید کرد.

✨ تا ۷۰% تخفیف با شارژ کیف پول 🎁
مشاهده پلن ها