در حال حاضر محصولی در سبد خرید شما وجود ندارد.

از زمین به بالا بیاموزید تا بازوبند خود را بسازید و آن را به صورت بی سیم کنترل کنید
عنوان اصلی : Build your own ArmBot step by step using Raspberry Pi Zero
سرفصل های دوره :
مقدمه:
نمودار مدار - اضافه کردن سیم های زنده و خنثی (مبتنی بر تخته)
آزمایش L293D با موتورهای تک و دوگانه:
نمودار مدار - کنترل موتور منفرد (بر پایه تخته)
کد منبع - کنترل موتور تک با استفاده از تخته نان
نمودار مدار - کنترل موتورهای دوگانه (مبتنی بر تخته)
کد منبع - کنترل موتور دوم
اساسی
درجه آزادی و طراحی بازوبند:
درک IC ساختگی در PCB و درجه آزادی
الزامات سخت افزاری
سند - لیست نیازهای سخت افزاری
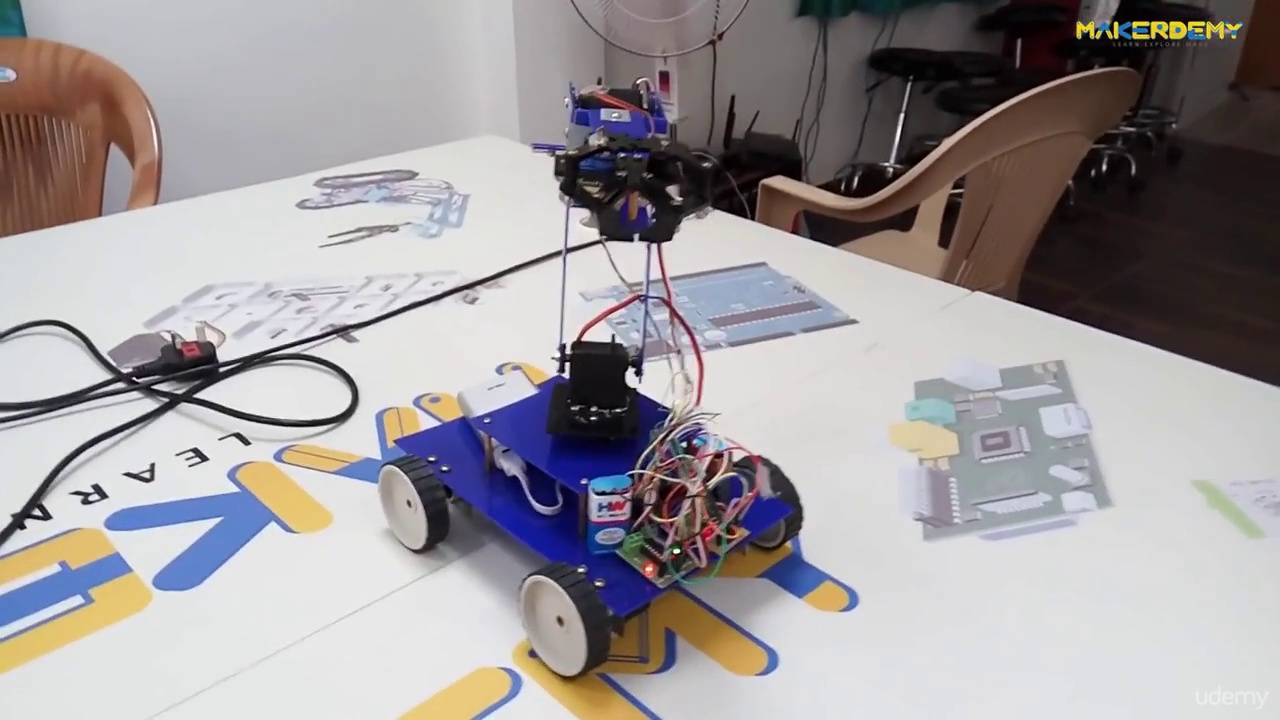
طراحی و مونتاژ سخت افزار
نمودار مدار - کنترل هر چهار موتور پایه ربات
نمودار مدار - کنترل بازو
برنامه نویسی من
برنامه نویسی پایه بازوبند:
درک کد - ضبط ورودی کاربر
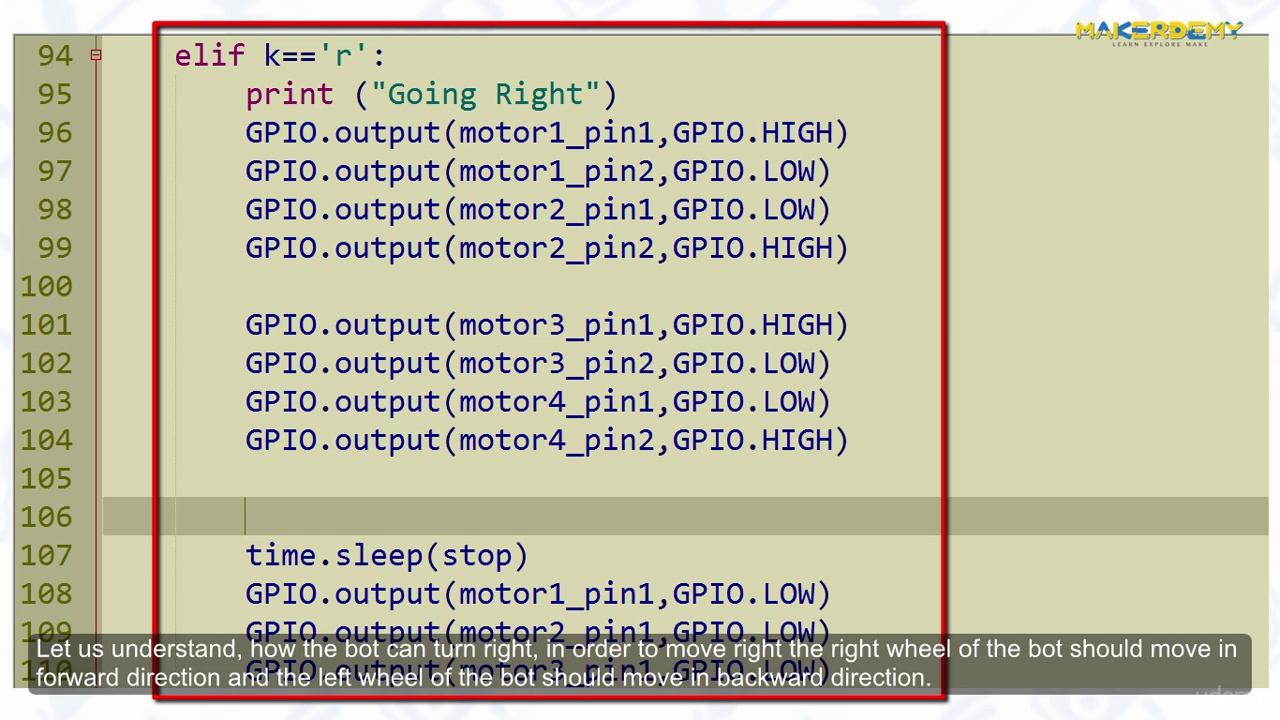
کد منبع - کنترل ربات
نسخه ی نمایشی زمان واقعی - کنترل ربات
برنامه نویسی II
برنامه نویسی بازوی ربات:
رابط کاربری گرافیکی با استفاده از tkinter
درک کد - GUI با استفاده از tkinter
درک کد - طراحی نوار اسلاید
کد منبع - کنترل بازو
کد منبع - موتورهای اضافی سروو
نسخه ی نمایشی زمان واقعی - کنترل بازوی ربات
نتیجه گیری
Build your own ArmBot step by step using Raspberry Pi Zero
در این روش نیاز به افزودن محصول به سبد خرید و تکمیل اطلاعات نیست و شما پس از وارد کردن ایمیل خود و طی کردن مراحل پرداخت لینک های دریافت محصولات را در ایمیل خود دریافت خواهید کرد.


آموزش طراحی و کار با مدارهای میکرو

کورس یادگیری اینترنت اشیا در Azure

الکسا را به روش سرگرم کننده بیاموزید

ماژول کامپیوت Raspberry Pi : از مبتدی تا پیشرفته

مقدمه ای بر MicroPython بوسیله Pyboard

Introduction to the IoT Development Framework : ESP-IDF
-Automation-Using-Raspberry-Pi-2-main-resized.jpg)
اتوماسیون اینترنت چیزها (IoT) با استفاده از Raspberry Pi 2

دوره گام به گام مهارت های توسعه Alexa

نمونه سازی و توسعه برنامه ها بوسیله Node-RED

ساخت آینه هوشمند بوسیله Raspberry Pi
✨ تا ۷۰% تخفیف با شارژ کیف پول 🎁
مشاهده پلن ها






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}