در حال حاضر محصولی در سبد خرید شما وجود ندارد.

پیچیدگی بالای وظایفی که روبات های موبایل مدرن با استفاده از زیرساخت برنامه نویسی روبرو هستند و باعث می شود ادغام کارآمد زیر سیستم های توسعه یافته مستقل در یک سیستم واحد امکان پذیر کردن عملکرد روبات های خودمختار را فراهم کند. سیستم عامل ربات (ROS) محیطی را برای توسعه نرم افزار کنترل مدولار ، یک زیرساخت ارتباطی برای اتصال اجزای نرم افزاری و یک کتابخانه منبع باز الگوریتم های اجرا شده ارائه می دهد. در سالهای گذشته ROS به استانداردی برای کنترل روبات در جامعه دانشگاهی تبدیل شده است و تأثیر آن نیز در این صنعت گسترش می یابد. در دامنه این دوره ما باید توسعه عملی ماژول های نرم افزاری در محیط ROS و ادغام آنها را در یک سیستم کاملاً کاربردی برای کنترل ربات های خودمختار پوشش دهیم.
عنوان اصلی : Ros Programming And Simulation
سرفصل های دوره :
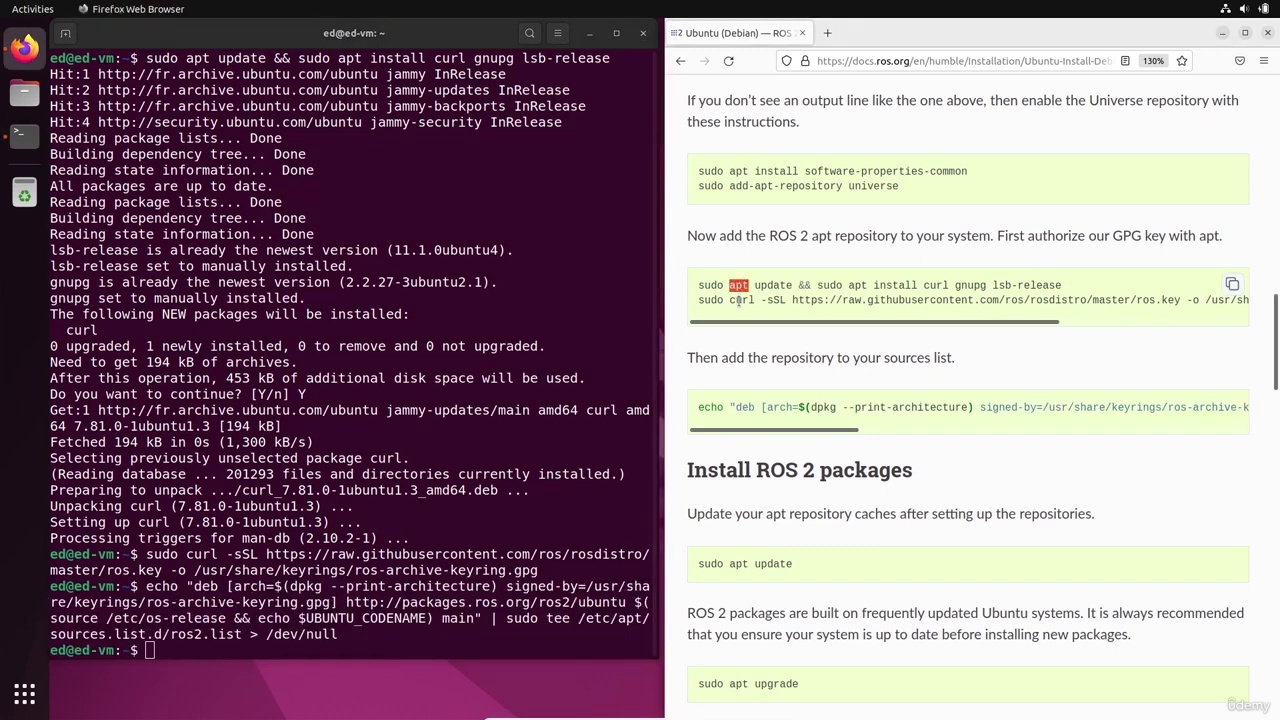
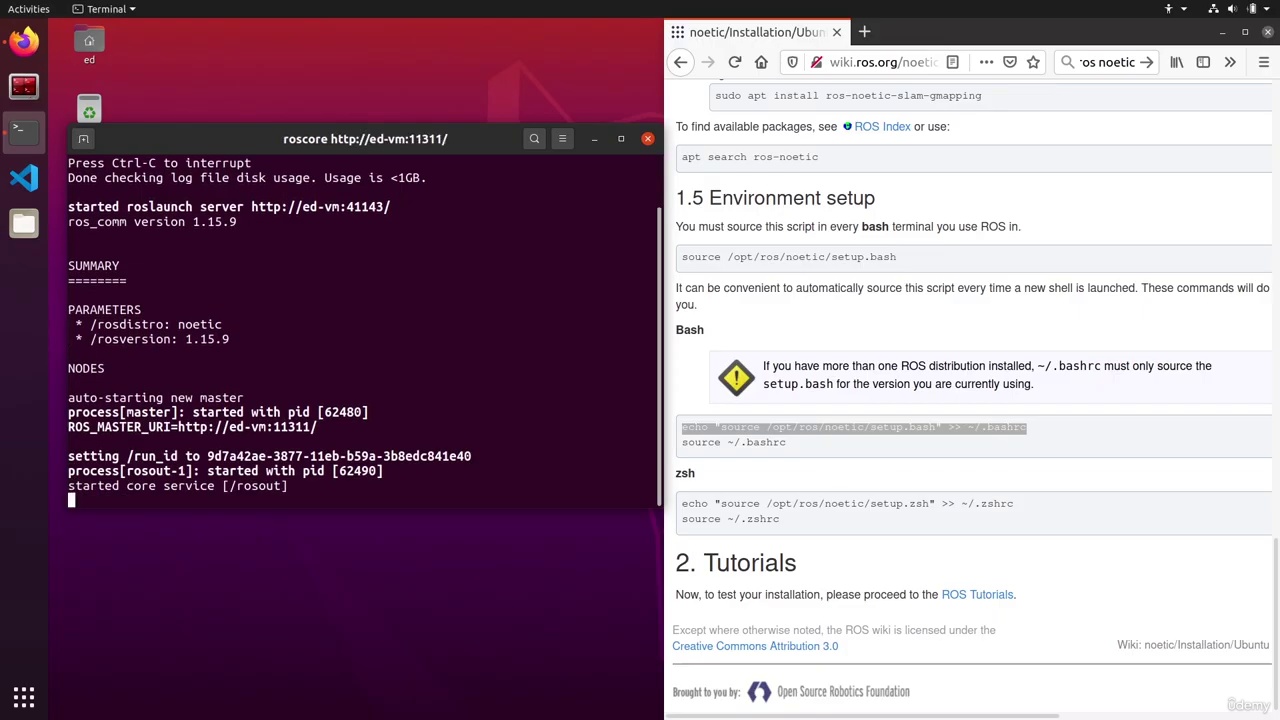
01 نحوه نصب ROS Noetic در اوبونتو
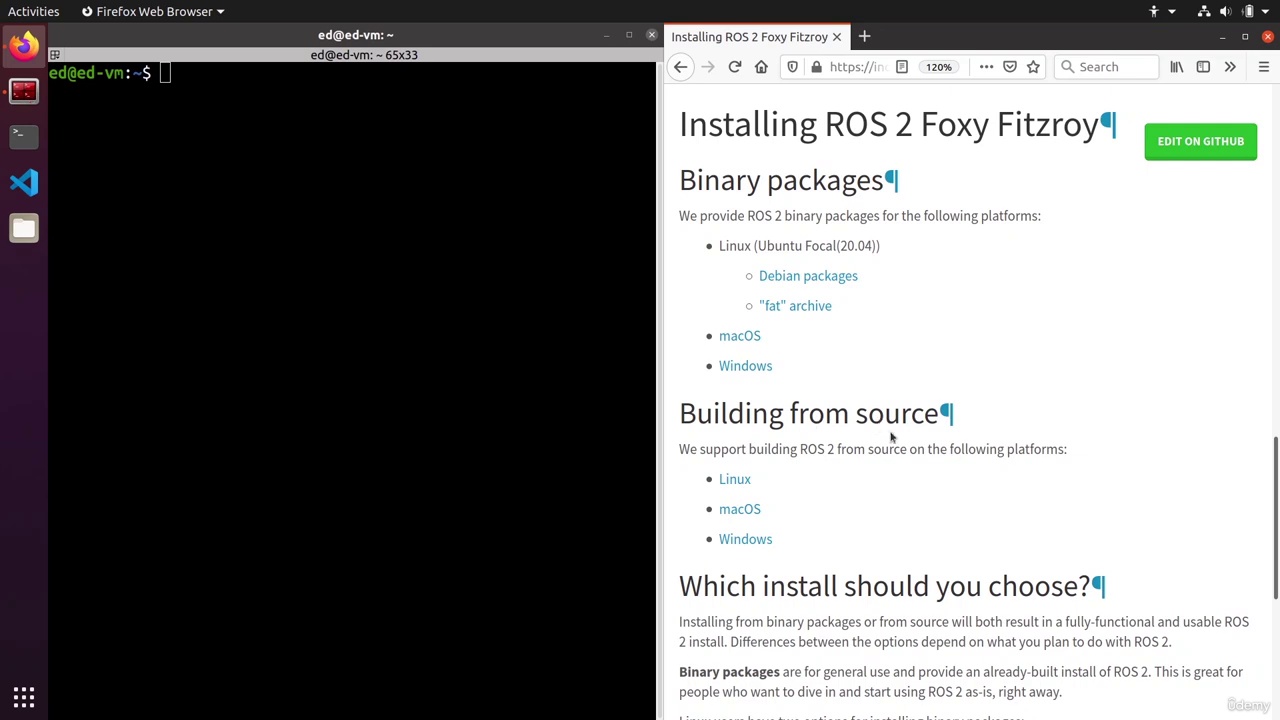
02 نحوه نصب ROS2 Foxy در اوبونتو
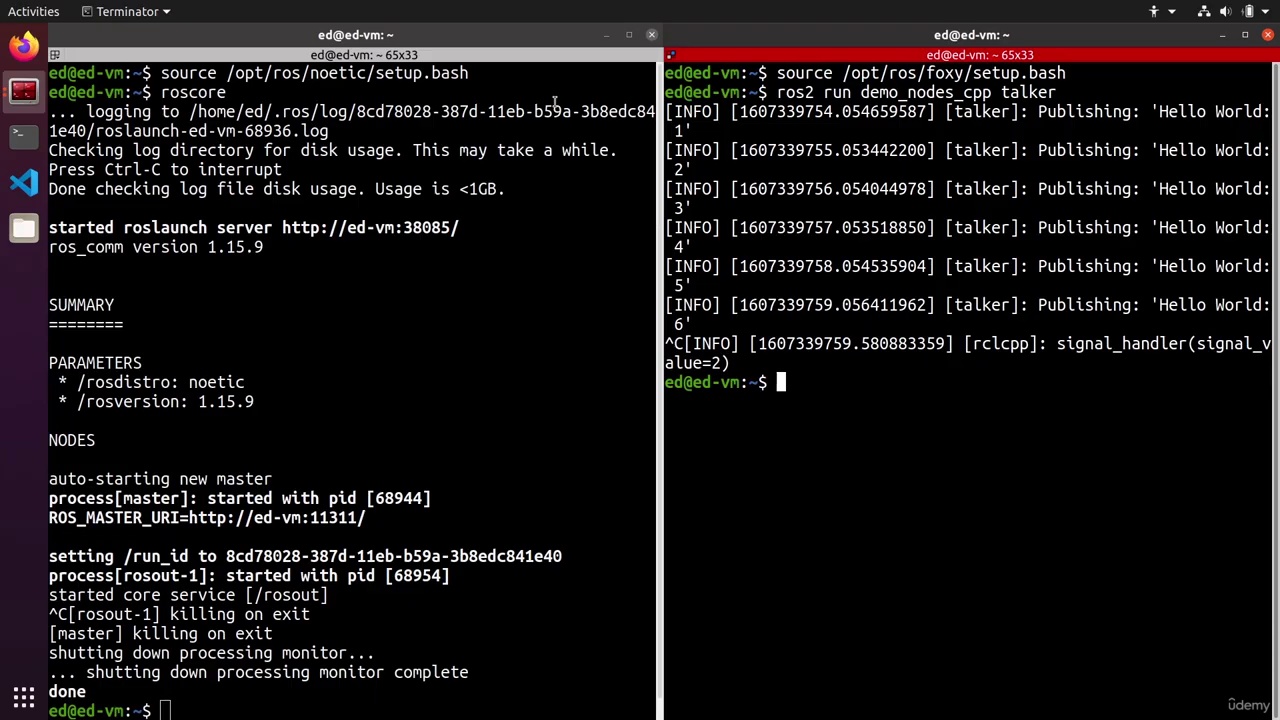
03 نحوه کار با چندین توزیع همزمان ROS1 و ROS2
04 فرمان Roscore پیدا نکرد که چگونه اصلاح کنید
05 دستور ROS2 نحوه رفع آن یافت نشد
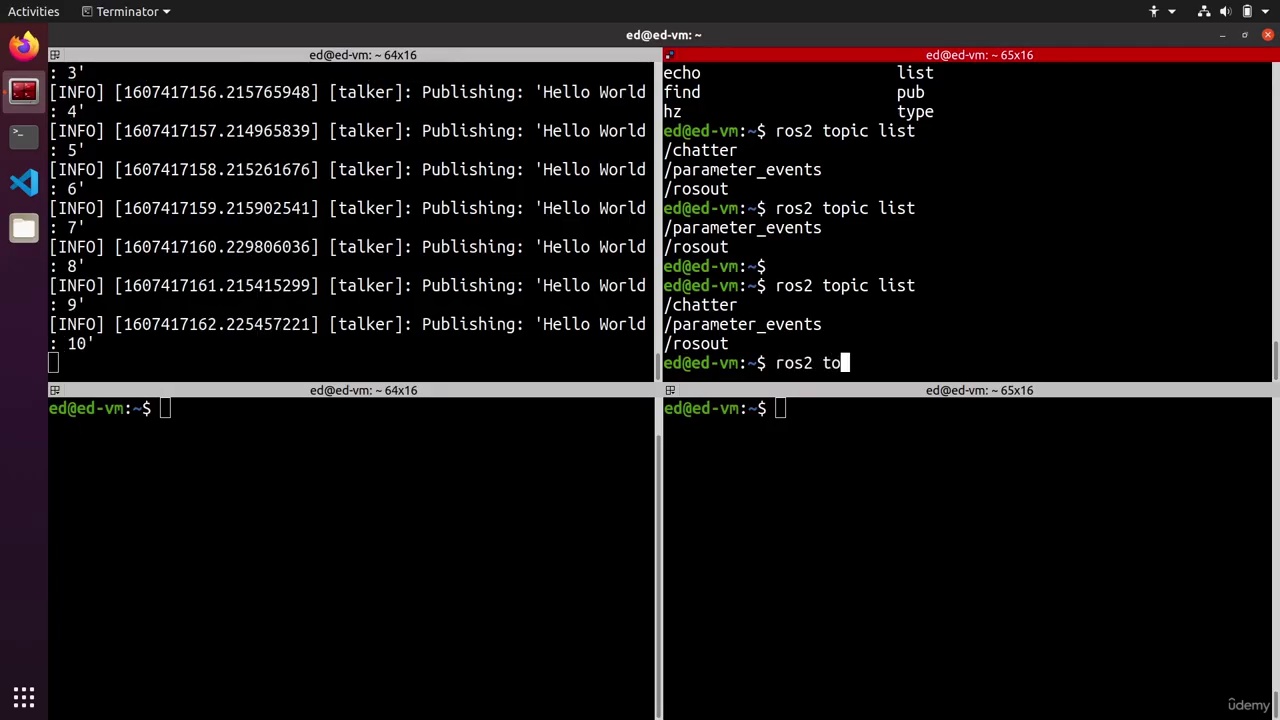
06 ROS2 خط فرمان خط راه رفتن
07 ROS2 Service Line Walkthrough
08 نحوه ایجاد یک pac torkspac
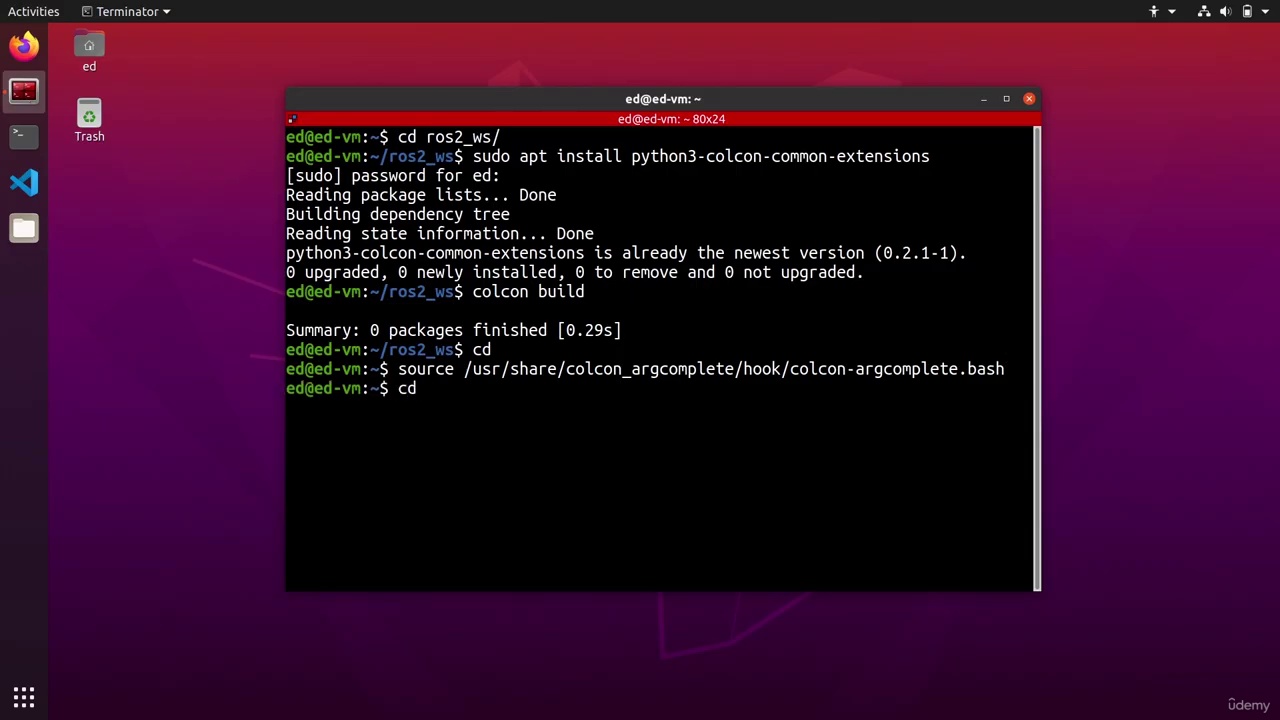
09 چگونه می توان برای colcon به طور خودکار دریافت کرد
10 نحوه ارسال درخواست خدمات با RQT
11 نحوه مهاجرت یک پروژه ROS1 به ROS2 توضیح سطح بالا
12 نمای کلی برای توسعه دهندگان ROS
13 بسته ای را برای هر دو گره C و Python ایجاد کنید
14 با چندین فضای کاری کار کنید
15 ROS2 فروتن را در اوبونتو نصب کنید
Ros Programming And Simulation
در این روش نیاز به افزودن محصول به سبد خرید و تکمیل اطلاعات نیست و شما پس از وارد کردن ایمیل خود و طی کردن مراحل پرداخت لینک های دریافت محصولات را در ایمیل خود دریافت خواهید کرد.


تحلیلگر داده : پروژه دنیای واقعی در پایتون

برنامه نویسی ROS و شبیه سازی بوسیله آن

برنامه نویسی و شبیه سازی کارخانه با Tia Portal

دوره Excel 101

دنی اکواریا 5 نکته برای میکس صدای خواننده

نقاشی و تصویرگری دیجیتال در فتوشاپ

ساخت تراس پشت بام بوسیله Grasshopper در Rhino

حملات Shell معکوس توسط پایتون برای مبتدیان

Adobe Premiere Pro را از اول تا آخر یاد بگیرید

مبانی خط فرمان Linux – تبدیل به یک کاربر قدرت لینوکس شوید!
✨ تا ۷۰% تخفیف با شارژ کیف پول 🎁
مشاهده پلن ها






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}