در حال حاضر محصولی در سبد خرید شما وجود ندارد.

برای ناوبری مبتنی بر مبتنی بر مبتدیان III با Rosbridge به دوره ROS خوش آمدید. من آنیس کوبا هستم و در این دوره مربی شما خواهم بود. این دوره سومین دوره سری ROS برای مبتدیان است. این یک دوره مبتنی بر پروژه است که به نحوه توسعه یک رابط وب برای TELEOPERATE و تعامل با روبات های دارای ROS می پردازد.
عنوان اصلی : Ros Programming And Simulation 3
سرفصل های دوره :
01 نصب و راه اندازی Ros Noetic
02 می فهمید گره ROS چیست
03 فضای کاری catkin را ایجاد و راه اندازی کنید
04 یک بسته ROS ایجاد کنید
05 گره ROS را با پایتون بنویسید
06 بفهمید موضوع ROS چیست
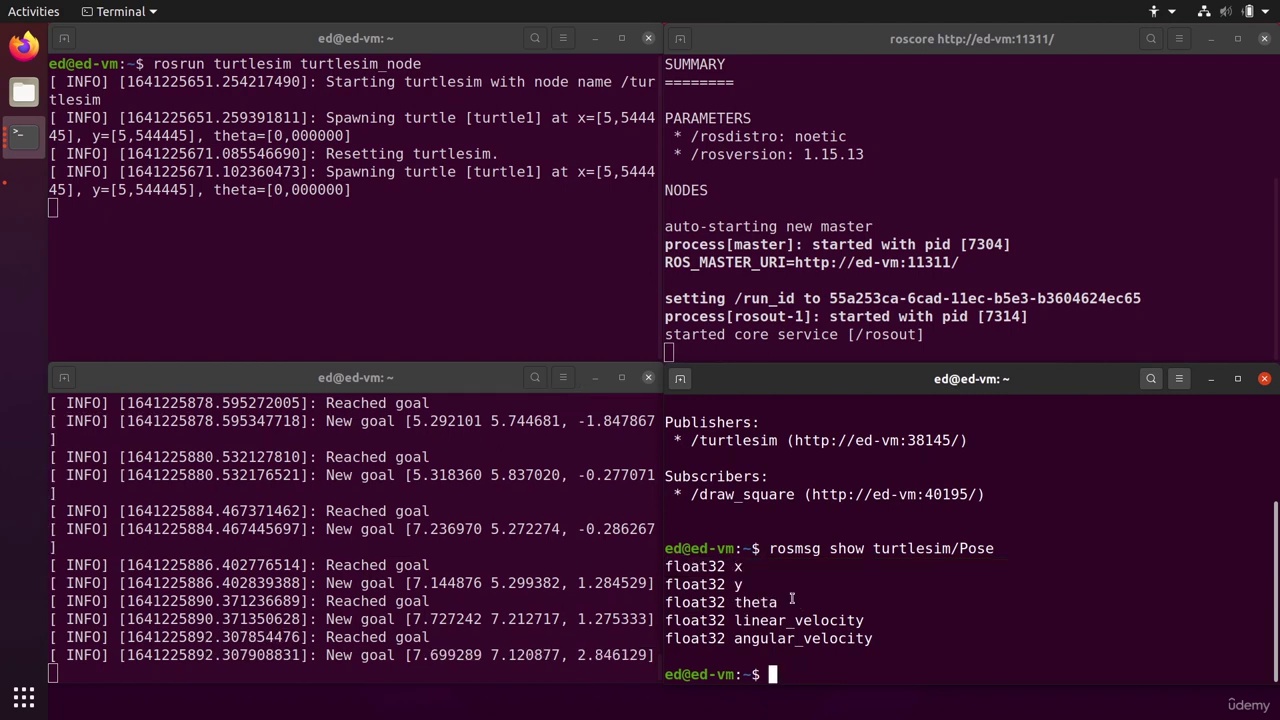
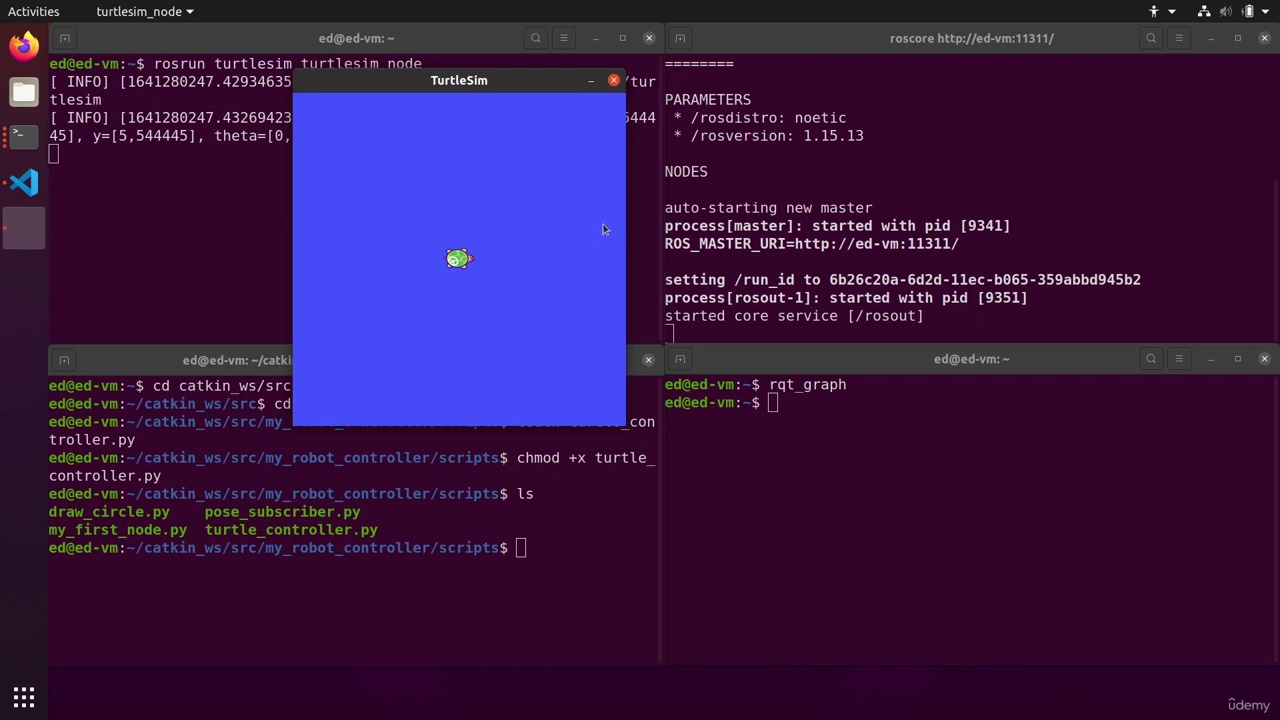
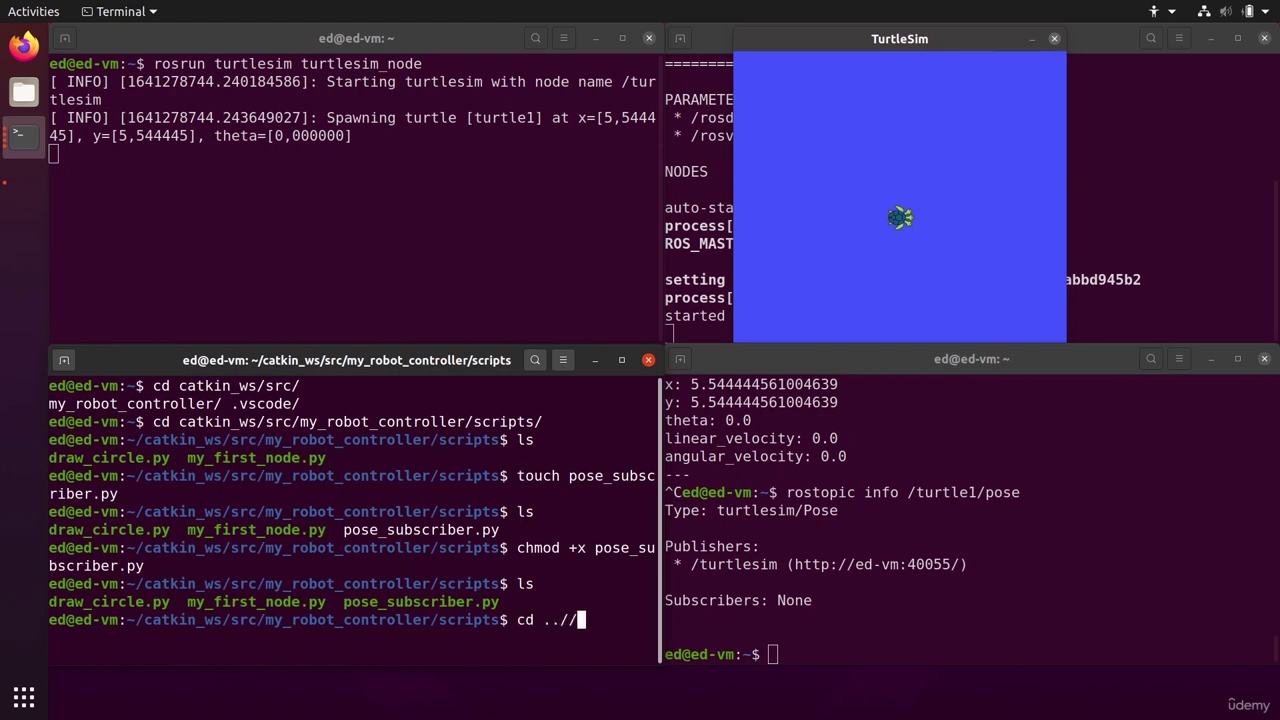
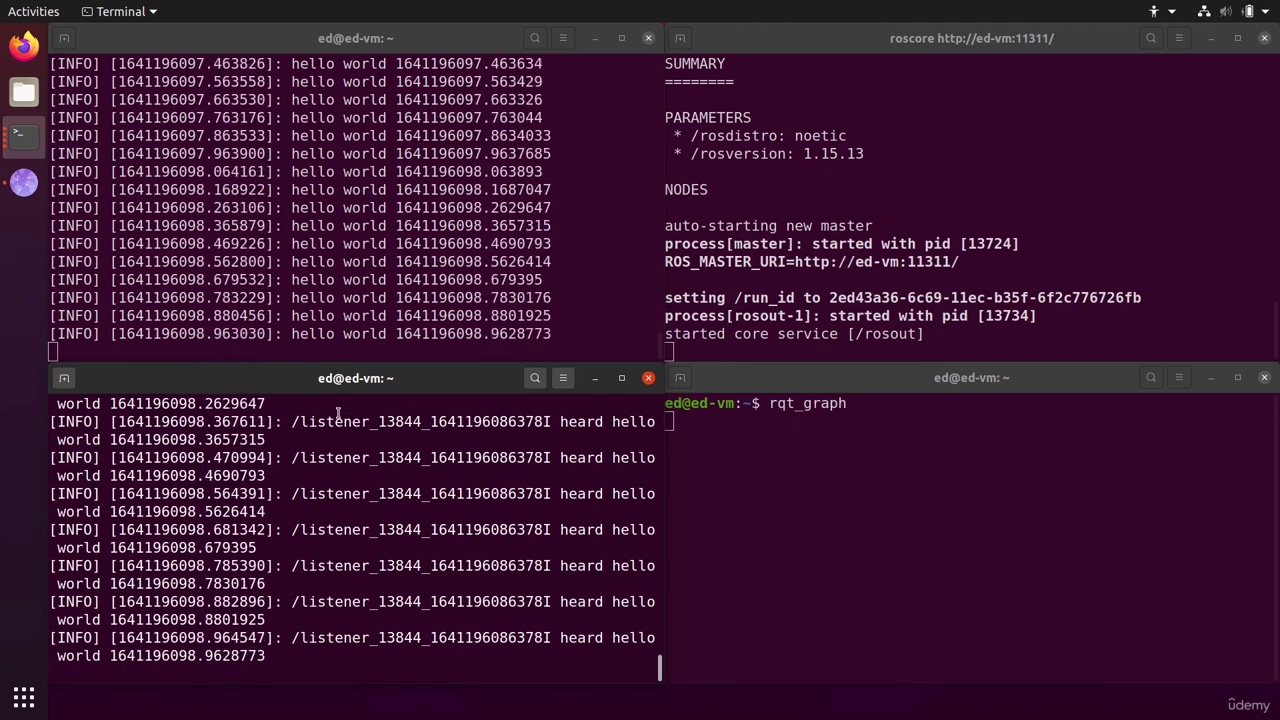
07 یک ناشر ROS با پایتون بنویسید
08 مشترک ROS را با پایتون بنویسید
09 ناشر و مشترک را در یک سیستم حلقه بسته ترکیب کنید
10 بفهمید سرویس ROS چیست
11 یک مشتری سرویس ROS را با پایتون بنویسید
Ros Programming And Simulation 3
در این روش نیاز به افزودن محصول به سبد خرید و تکمیل اطلاعات نیست و شما پس از وارد کردن ایمیل خود و طی کردن مراحل پرداخت لینک های دریافت محصولات را در ایمیل خود دریافت خواهید کرد.


اتومات کردن کار با App های موبایل بوسیله Appium 1.22v و Java

سرویس کانتینر الاستیک آمازون : یادگیری عمیق و پیشرفته

ویرایش و دستکاری موثر داده های تاریخ و زمان ، رشته ها و غیره در زبان R

ساخت یک بازی شوتر در Unreal Engine 5

برنامه نویسی PLC برای Siemens Tia Portal

راه اندازی پروژه های واقعی در نرم افزار JIRA

ساخت App های Web 3.0

ساخت یک بازی چند نفره تحت شبکه بوسیله Game Maker Studio 2
-main-resized.jpg)
ساخت یک وب سایت تجارت الکترونیک بوسیله WordPress 2022

ساخت سیستم موجودی برای بازی ها در نرم افزار بازی سازی Unreal Engine 4, 5






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}