در حال حاضر محصولی در سبد خرید شما وجود ندارد.

با صدای خود یک ربات واقعی با ROS
ایجاد و کنترل کنید
عنوان اصلی : Robotics and ROS - Learn by Doing! Manipulators
سرفصل های دوره :
مقدمه ای برای دوره:
ساختار دوره
چرا یک سیستم عامل برای روبات ها
محیط را تنظیم کنید:
اوبونتو را روی ماشین مجازی نصب کنید
اوبونتو را روی بوت دوگانه نصب کنید
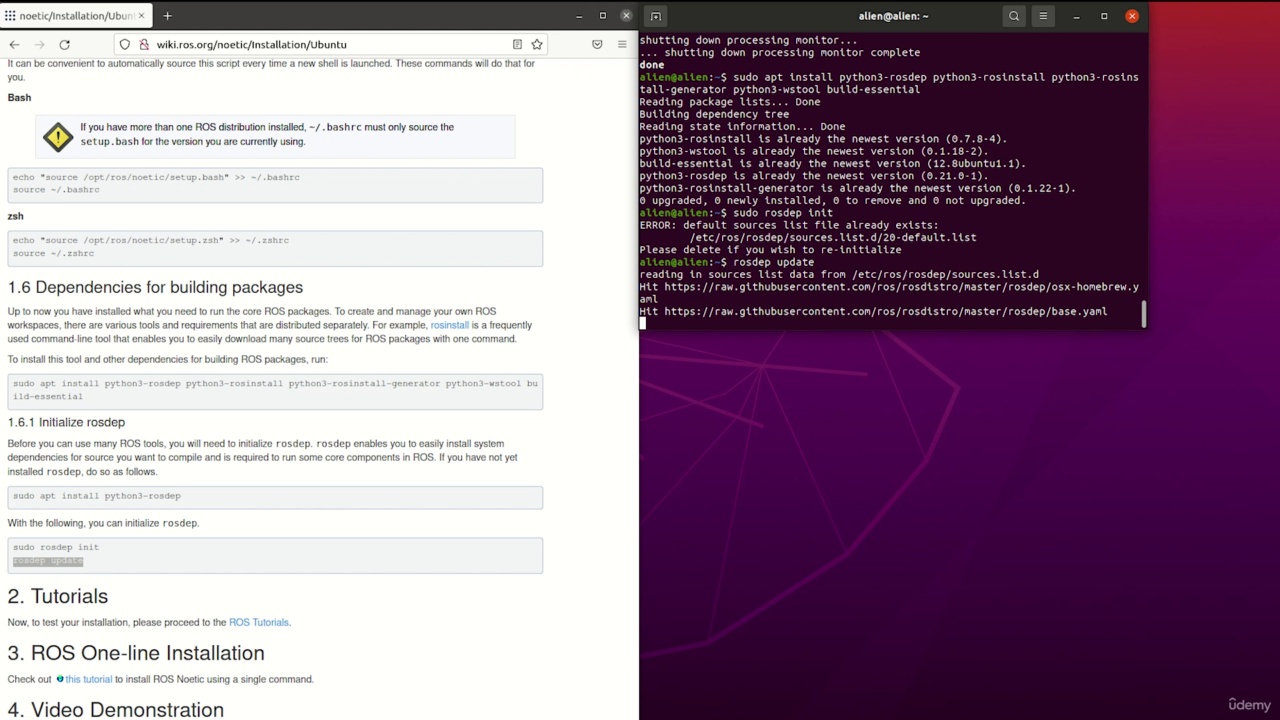
ROS را نصب کنید
ماژول ها و وابستگی ها را نصب کنید
با استفاده از Docker
مقدمه ROS:
ROS چیست
انتزاع سخت افزار
CNTROL دستگاه سطح پایین
پیام رسانی بین روند
مدیریت بسته
معماری یک برنامه ROS
اولین پروژه ROS را ایجاد کنید
یک گره ناشر ایجاد کنید
یک گره ناشر ایجاد کنید
یک گره مشترک ایجاد کنید
یک گره مشترک ایجاد کنید
دوقلوی دیجیتال:
یک دوقلوی دیجیتال چیست
rviz
urdf
دوقلو دیجیتال را ایجاد کنید
دوقلو دیجیتال را کامل کنید
سرور پارامتر ROS
سرور پارامتر ROS
ربات را در RVIZ مشاهده کنید
gazebo
URDF برای شبیه سازی
پرونده پرتاب ROS
تجسم را راه اندازی کنید
شبیه سازی را راه اندازی کنید
کنترل:
کنترل ROS
پرونده پیکربندی YAML
سرور پارامتر فایل پیکربندی را بارگذاری کنید
تایمر ROS
یک تایمر ROS ایجاد کنید
یک تایمر ROS ایجاد کنید
خدمات ROS
ایجاد یک سرور سرویس
یک سرور سرویس ایجاد کنید
ایجاد یک سرویس دهنده خدمات
یک مشتری سرویس ایجاد کنید
سرویس مبدل زاویه
سرور سرویس دهنده زاویه ها
سرور سرویس دهنده زاویه ها
کنترلر را ایجاد کنید
کنترلر را کامل کنید
کنترلر را پیکربندی کنید
کنترلر را راه اندازی کنید
سینماتیک:
kinematics روبات
فریم های 2D - ترجمه
فریم های 2D - چرخش
فریم های 2D - انتقال روت
3D Framesc - ترجمه
قاب های سه بعدی - چرخش
قاب های سه بعدی - انتقال روت
سینماتیک رو به جلو
بسته TF
سینماتیک معکوس
حرکت!
حرکت! راه اندازی
پیکربندی MoveIt!
برنامه ها:
برنامه های ربات
اقدامات ROS
رابط ActionLib
یک سرور اکشن ایجاد کنید
یک سرور اکشن ایجاد کنید
یک مشتری اکشن ایجاد کنید
یک مشتری اکشن ایجاد کنید
سرور اکشن برنامه
سرور اکشن برنامه
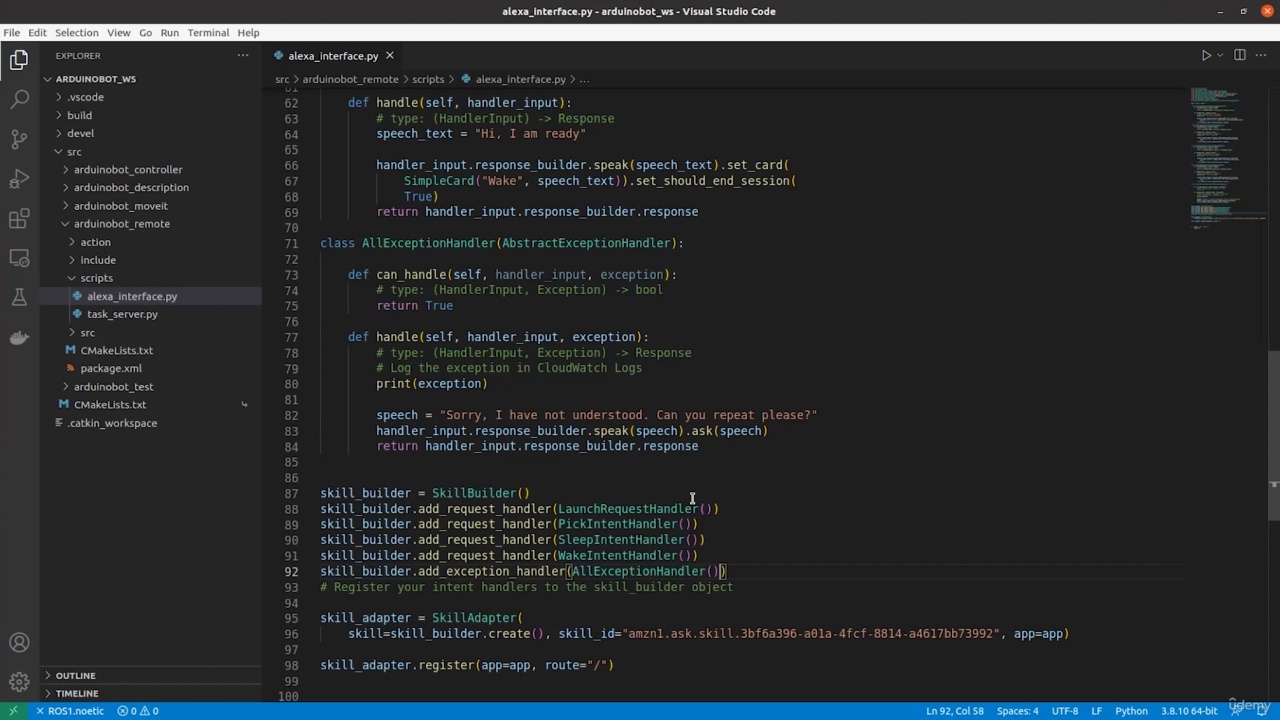
ادغام الکسا:
مهارت الکسا
مهارت های الکسا را توسعه دهید
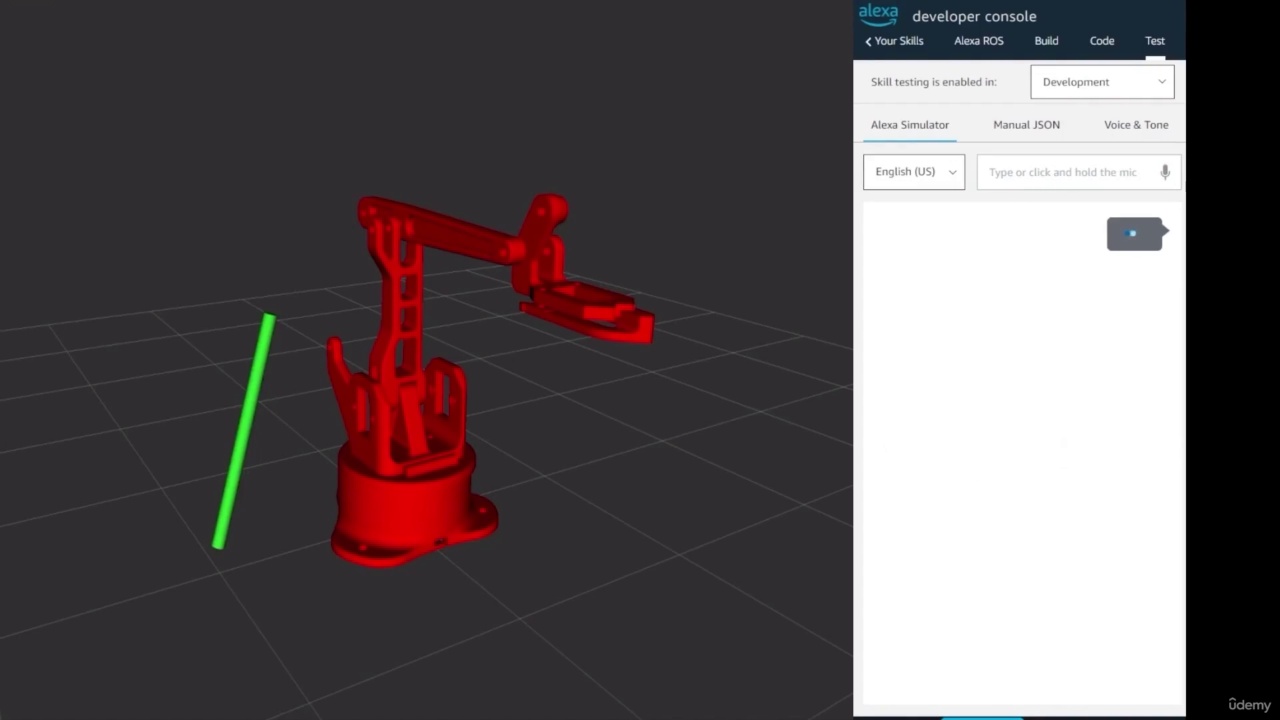
تست مهارت های الکسا
رابط ربات را با الکسا رابط کنید
مدل تعامل صوتی
شبیه سازی کامل ربات
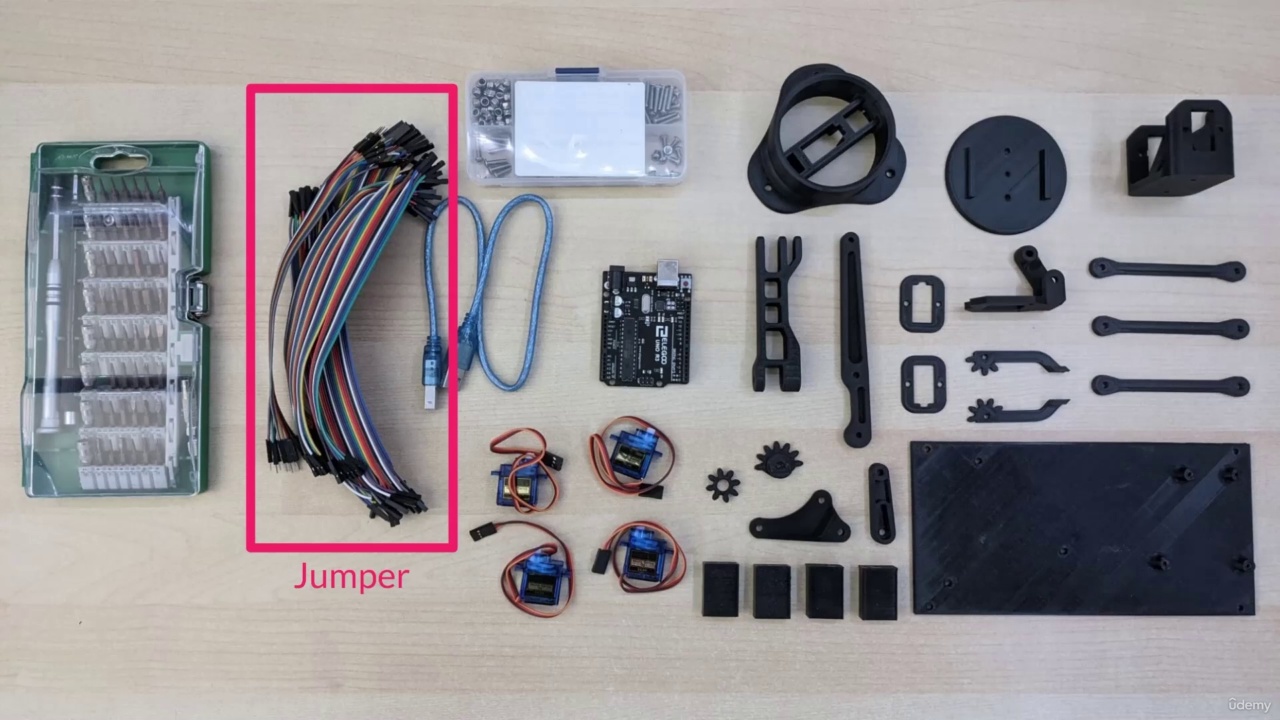
ربات را بسازید:
مکانیک و الکترونیک
Arduino و ROS
یک گره ناشر با Arduino ایجاد کنید
یک گره مشترک با Arduino ایجاد کنید
servomotors با Arduino
کنترل ربات با Arduino
ربات کامل را راه اندازی کنید
نتیجه گیری:
خلاصه
بعدی چیست؟
Robotics and ROS - Learn by Doing! Manipulators
در این روش نیاز به افزودن محصول به سبد خرید و تکمیل اطلاعات نیست و شما پس از وارد کردن ایمیل خود و طی کردن مراحل پرداخت لینک های دریافت محصولات را در ایمیل خود دریافت خواهید کرد.

✨ تا ۷۰% تخفیف با شارژ کیف پول 🎁
مشاهده پلن ها










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}