1. Intro
2.1 my ADAS course.html
2. ADAS and Autonomous Driving
3.1 My Automotive Camera online course 1.html
3.2 my Automotive Radar online course.html
3. Sensors in ADAS and Autonomous vehicles
4.1 Research paper GNSS-based Localization for Autonomous Vehicles Prospects and Challenges.pdf
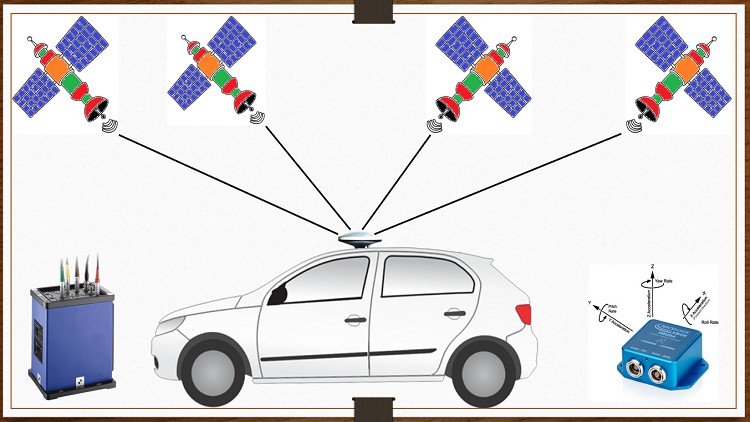
4. GNSS applications in ADAS and Autonomous Driving - Part 1
5.1 Research paper GNSS-based Localization for Autonomous Vehicles Prospects and Challenges.pdf
5.2 Research paper Real-Time Hybrid Multi-Sensor Fusion Framework for Autonomous vehicles.pdf
5. GNSS applications in ADAS and Autonomous Driving - Part 2
6.1 Research paper Application of GNSS technology in surface mining.pdf
6.2 Research paper GNSS in Precision Agricultural Operations.pdf
6.3 Research paper GNSS in railway signaling.pdf
6.4 Research paper GNSS-based navigation systems of autonomous drone .pdf
6.5 Research paper Location based services using geographical information systems.pdf
6. GNSS applications - other domains
7. GNSS, INS sensors available in market
8. Some Terms and definitions
9. Outro