در حال حاضر محصولی در سبد خرید شما وجود ندارد.

ترکیب قدرت یادگیری ماشین، یادگیری عمیق و دیدگاه کامپیوتری برای ساخت یک ماشین خود رانندگی!
عنوان اصلی : Machine Learning & Self-Driving Cars: Bootcamp with Python
سرفصل های دوره :
مقدمه:
چگونه به این دوره نزدیک شوید؟
آن را جذاب کنید
دریافت کد درس برای سخنرانی های عملی
Python [اختیاری]:
توابع
برنامه نویسی شی گرا
کلاس ها
کتابخانه های ضروری پایتون:
معرفی کتابخانه های پایتون
numpy
Matplotlib
opencv
چشم انداز کامپیوتر:
آستانه
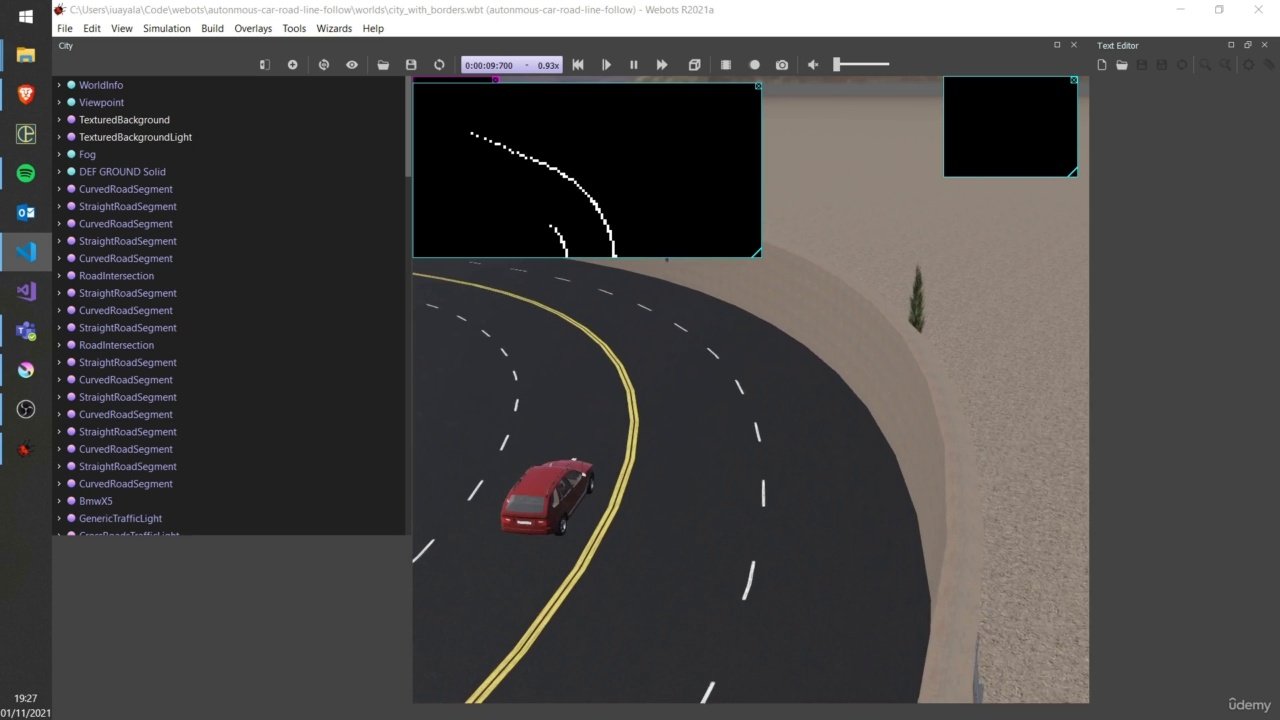
تقسیم جاده
چرا وب؟
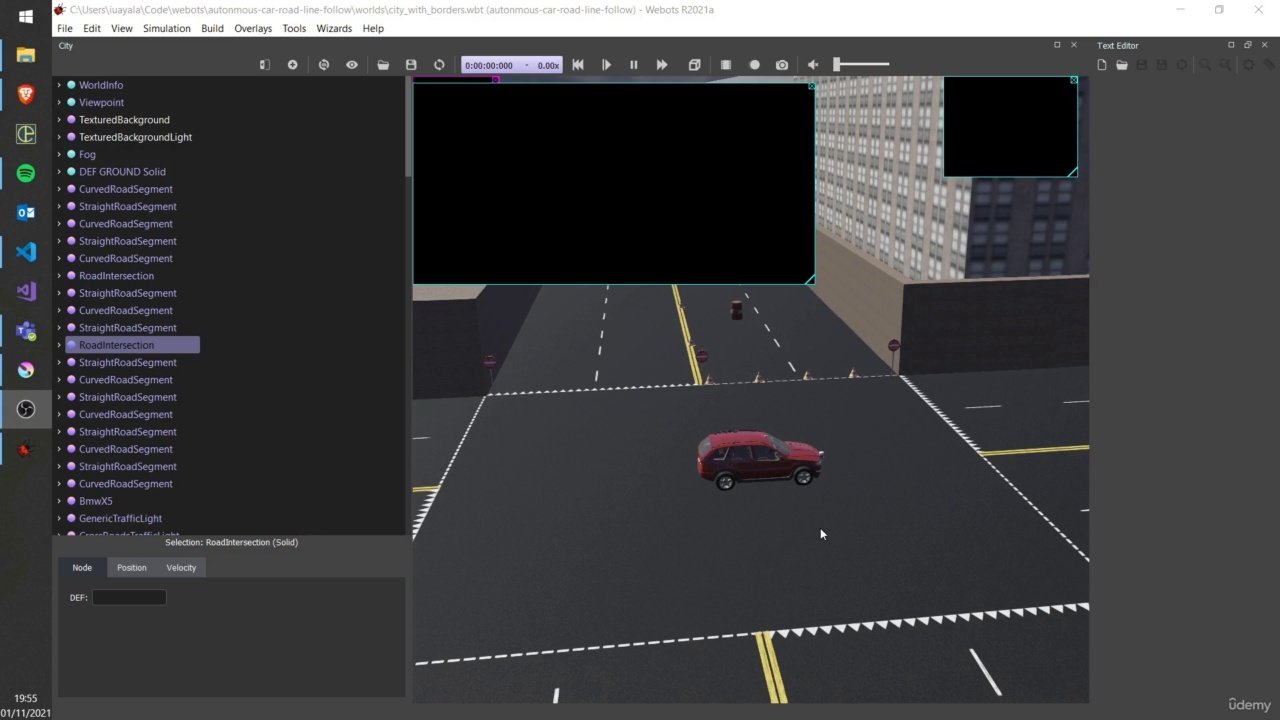
نحوه نصب Webots در ویندوز؟
نحوه نصب Webots در لینوکس؟
Webots خیلی آهسته؟
Webots Code: توضیح داده شده است
[ورزش]: الگوریتم زیر خط شما!
[پیشرفته] نحوه خواندن یک مقاله؟
[پیشرفته] مقاله: SIFT
یادگیری ماشین:
آموزش، پیش بینی و ارزیابی
انواع یادگیری ماشین
ML برای خودروهای خود رانندگی
ماشین یادگیری دست:
مهندسی ویژگی
hog
SVM
Metrics Performance
دانلود مجموعه داده ها
توضیح کد
[ورزش]: کد را تغییر دهید
مدل های مفید ML
variance vs vs
[پیشرفته] مقاله: SVM
اجتناب از برخورد:
سنسورهای محدوده
دوربین های دیجیتال
شبیه سازی
راه حل من
[ورزش]: راه حل شما
برنامه ریزی مسیر
[پیشرفته] کد RRT
یادگیری عمیق:
چگونه شبکه های عصبی کار می کنند؟
چگونه یک شبکه عصبی یاد می گیرد؟
شبکه های عصبی کانولوشن
مثال کد
یادگیری عمیق: دستگیره:
عمیق یادگیری دست: مقدمه
ایجاد یک مجموعه داده
آموزش
[ورزش]: خودتان را آموزش دهید!
[پیشرفته] Alexnet
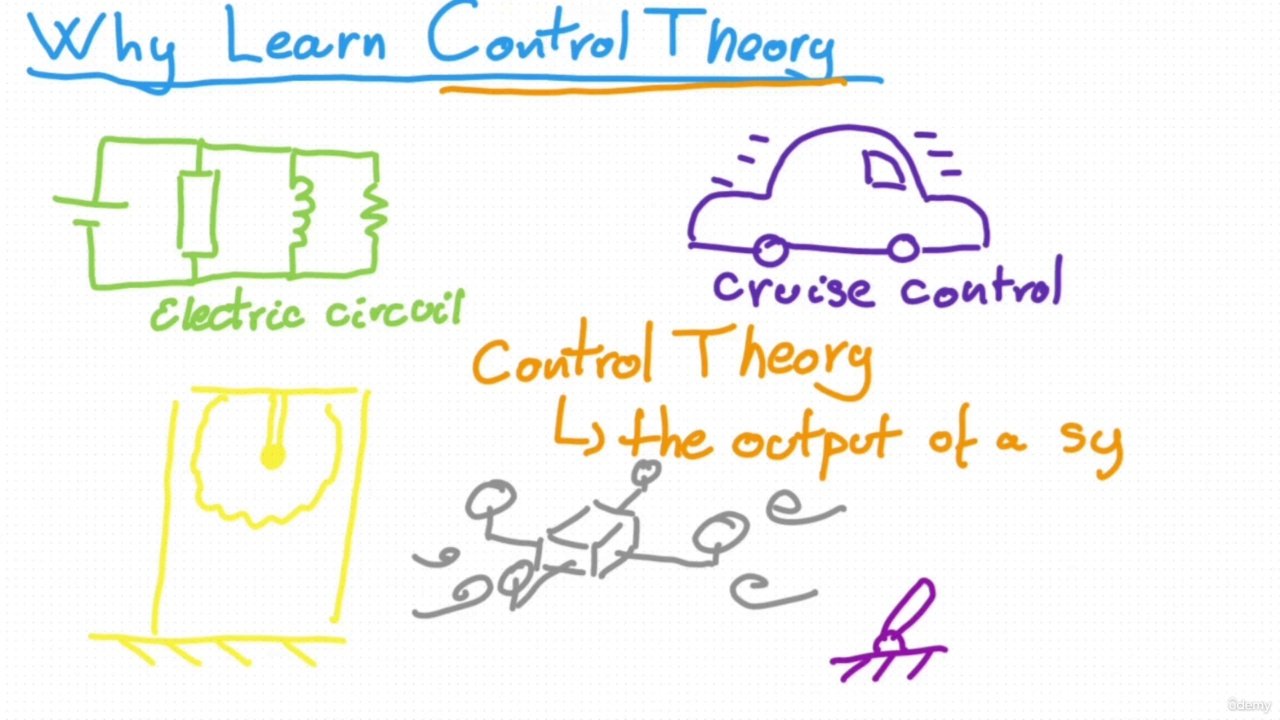
نظریه کنترل:
چرا نظریه کنترل را یاد بگیرید
نقشه سیستم های کنترل
ثبات - مقدمه
ثبات - گم شدن در یادگیری ماشین
کنترل حلقه باز و بسته
کنترل حلقه بسته - کنترل کروز
PID - مقدمه
PID Controller - شیرجه عمیق
PID Controller - چگونه آن را تنظیم کنید؟
PID Controller - چرا از آن استفاده می شود؟
[پیشرفته] مقاله: طراحی کنترل PID
Machine Learning & Self-Driving Cars: Bootcamp with Python
در این روش نیاز به افزودن محصول به سبد خرید و تکمیل اطلاعات نیست و شما پس از وارد کردن ایمیل خود و طی کردن مراحل پرداخت لینک های دریافت محصولات را در ایمیل خود دریافت خواهید کرد.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}