در حال حاضر محصولی در سبد خرید شما وجود ندارد.

سیستم عامل ربات برای مبتدیان
عنوان اصلی : Zero to ROS
سرفصل های دوره :
مقدمه:
معرفی با Tiziano و کریس
تنظیم محیط کاری خود:
نصب لینوکس بر روی ماشین مجازی
SETUP ROS
فضای کاری Catkin
تنظیم حساب GitHub خود را
Discord Server
نحوه ارائه تکالیف خود
ros hello world:
سلام جهان با موضوعات در ROS
یادگیری دست خود را با اولین پروژه ROS خود را:
معرفی
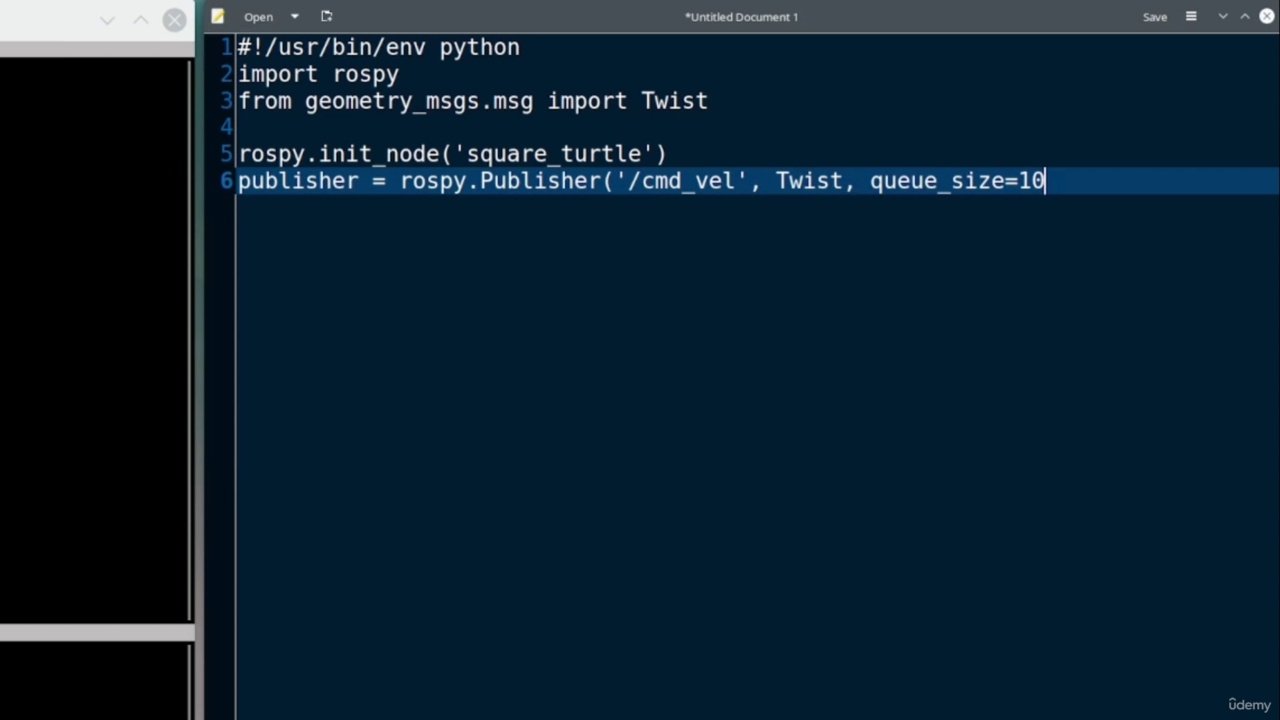
اولین ناشران ROS خود را (در پایتون) ایجاد کنید: ارتفاع سیلندر و شعاع
بررسی موضوعات منتشر شده در پنجره فرمان
نحوه رسیدن به منطقه و حجم محاسبه شده از موضوعات موجود
اولین مشترک ROS خود را ایجاد کنید (در پایتون)
پیام سفارشی خود را ایجاد کنید
گره ماشین حساب خود را ایجاد کنید
قرار دادن همه با هم: دریافت حجم سیلندر با ROS (و پایتون)
اولین فایل پرتاب ROS خود را ایجاد کنید
پروژه های خود را با RQT اشکال زدایی کنید
انتصاب: یک ماشین حساب ساده ایجاد کنید:
اختصاص دادن 01 - وزن سیلندر
اولین شبیه ساز ربات شما:
معرفی
یک ربات ساده را با صفحه کلید خود کنترل کنید
گرفتن روبات
به عنوان مثال: یک الگوی مربع برای Turtlesim خود تولید کنید
چگونه ورود به سیستم در ROS: Roslog
نحوه راه اندازی و تغییر پارامترهای ROS: Rosparam
انتصاب: ناوبری 2D:
انتساب 02 - اولین گره راهنمایی خود را بسازید
معرفی Gazebo و Rviz:
معرفی
معرفی به Gazebo و Rviz
ایجاد یک ربات توضیحات فایل XACRO
فایل راه اندازی برای شبیه سازی ربات
دریافت فایل XACRO خود را آماده برای Gazebo
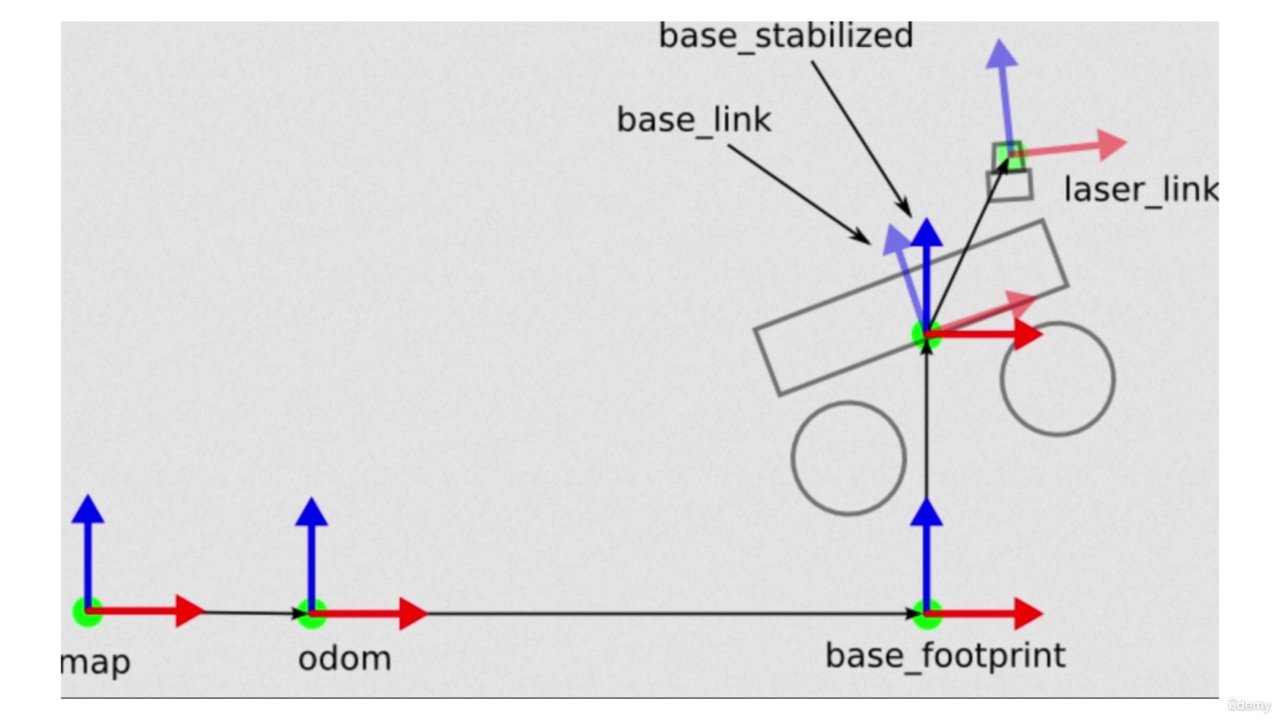
سیستم های مرجع و کتابخانه TF
محیط زیست 3D Gazebo و تجسم TF در Rviz
با گوش دادن به ناشر TF، موقعیت و جهت ربات را دریافت کنید
به عنوان مثال: نحوه وارد کردن دنیای Gazebo در پروژه شما
انتصاب: ناوبری 2D با Gazebo:
انتصاب 03 - ناوبری به یک هدف 2D با Gazebo و Rviz
ادراک ربات:
معرفی
نحوه افزودن یک یابنده دامنه به شبیه ساز ربات خود را با استفاده از XACRO و URDF
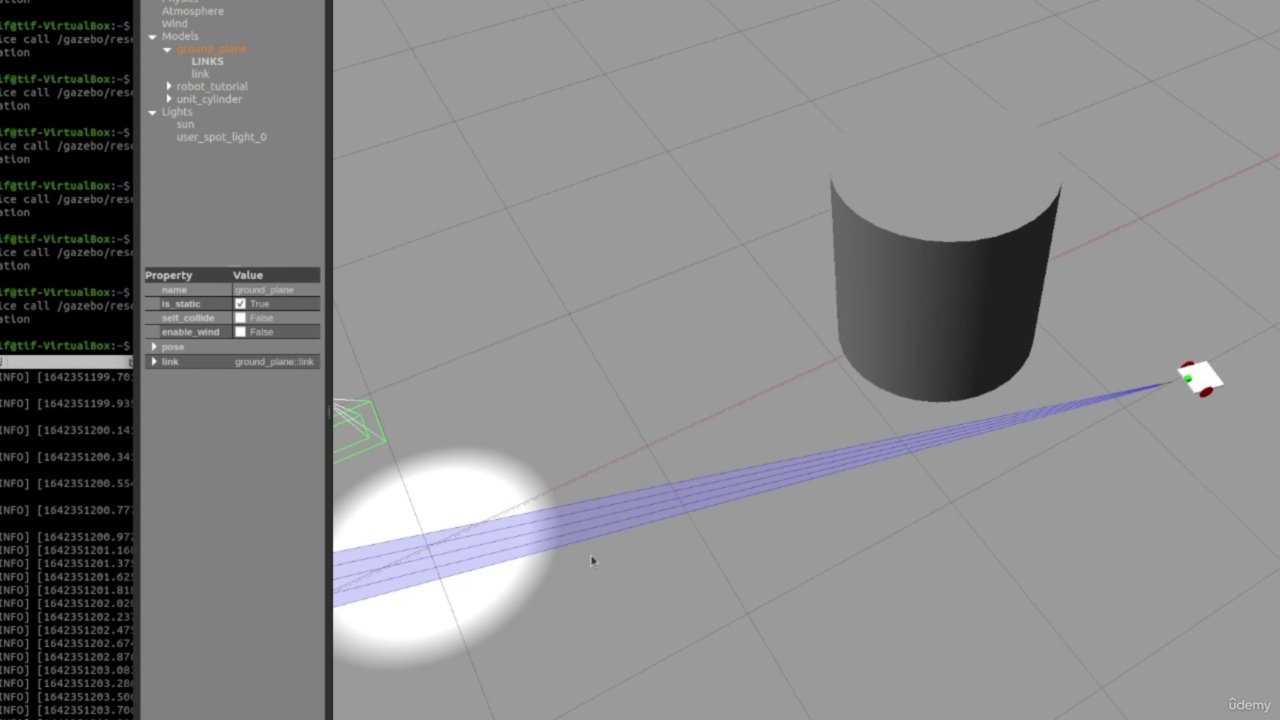
نحوه افزودن پلاگین LiDAR به شبیه سازی Gazebo شما
نحوه تجسم پلاگین لیزر اسکن در Rviz
ایجاد گره که تبدیل / اسکن به موضوع سونار / محدوده
تجسم سونار / محدوده در Gazebo و Rviz
انتصاب: ایجاد 3 سونار:
انتصاب 04 - 3 سونار
اجتناب از موانع:
معرفی
پیش نمایش مثال در عمل
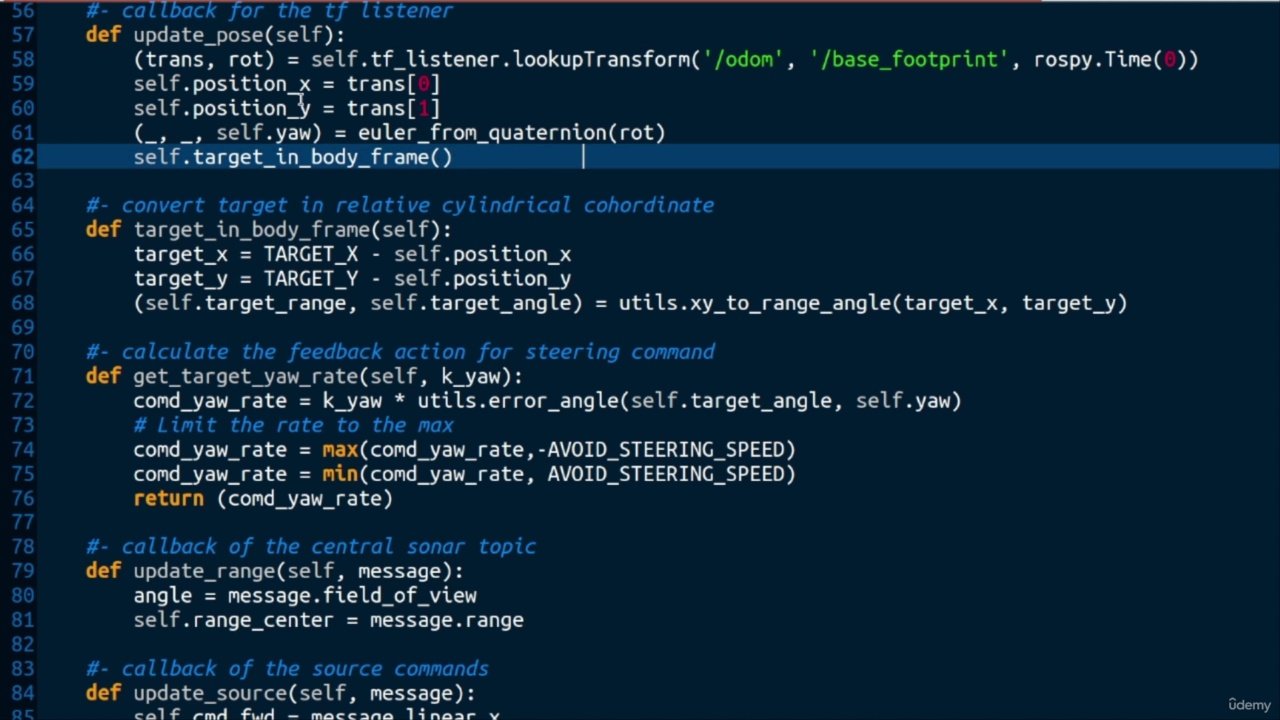
رمزگشایی الگوریتم اجتناب از مانع
اجرای مثال و اشکالزدایی با RQT
انتصاب نهایی:
انتصاب 05 - اجتناب از موانع
بخش پاداش:
سخنرانی پاداش
Zero to ROS
در این روش نیاز به افزودن محصول به سبد خرید و تکمیل اطلاعات نیست و شما پس از وارد کردن ایمیل خود و طی کردن مراحل پرداخت لینک های دریافت محصولات را در ایمیل خود دریافت خواهید کرد.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}