در حال حاضر محصولی در سبد خرید شما وجود ندارد.

Master ROS اقدامات و ایجاد برنامه های پیچیده تر روباتیک
عنوان اصلی : ROS Actions
سرفصل های دوره :
مقدمه:
محیط خود را برای این دوره تنظیم کنید
اگر از ROS Noetic استفاده می کنید (به جای ملودیک) این را بررسی کنید
چگونه می توان از این دوره بیشترین استفاده را کرد
اقدامات را با SimpleActionClient/SimpleActionServer کشف کنید:
معرفی
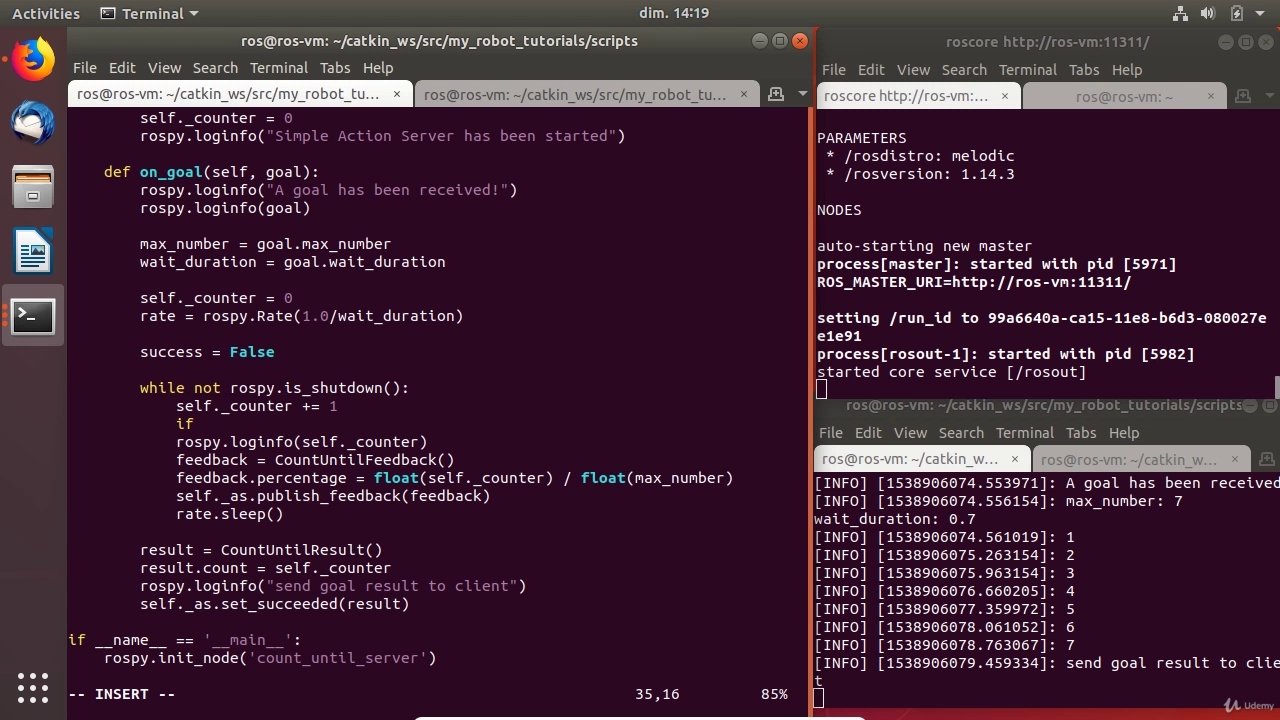
سرور با SimpleActionServer ایجاد کنید
با SimpleActionClient مشتری ایجاد کنید
مشتری خود را ناهمزمان کنید
هدفی را که موفق یا سقط شده است تعیین کنید
وضعیت هدف را درک کنید
یک هدف را لغو کنید
مباحث RAS DEBUG که در اقدامات ROS استفاده می شود
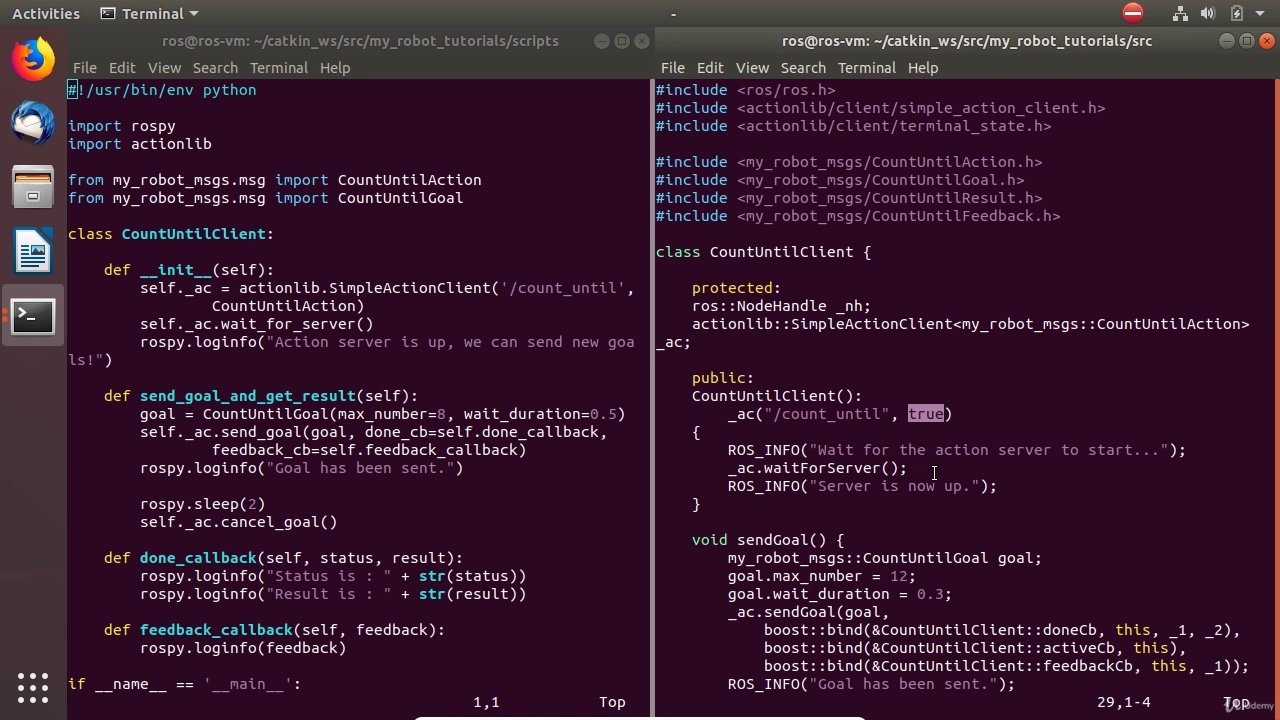
C ++ - با SimpleActionServer سرور ایجاد کنید
C ++ - با SimpleActionClient مشتری ایجاد کنید
مرجع مستندات برای SimpleActionClient و SimpleActionServer
نتیجه گیری بخش
فعالیت: آزمایش در SimpleActionClient/SimpleActionServer:
معرفی
تعریف عمل را ایجاد کنید
سرور را ایجاد کنید
مشتری را ایجاد کنید
هدف را با مشترک دیگر لغو کنید
از RQT_GRAPH برای اشکال زدایی نمودار ROS خود استفاده کنید
C ++ - سرور را ایجاد کنید
C ++ - مشتری را ایجاد کنید
نتیجه گیری بخش
به مرحله بعدی بروید: ActionClient و Activerver توضیح داد:
معرفی
محدودیت های اصلی ساده چیست؟
هنگامی که SimpleActions فقط همان چیزی است که شما نیاز دارید
یک Activerver چیست
ActionClient چیست
قبل از شروع چند لینک مستند
فعالیت: ایجاد یک عمل کامل و ActionServer:
معرفی
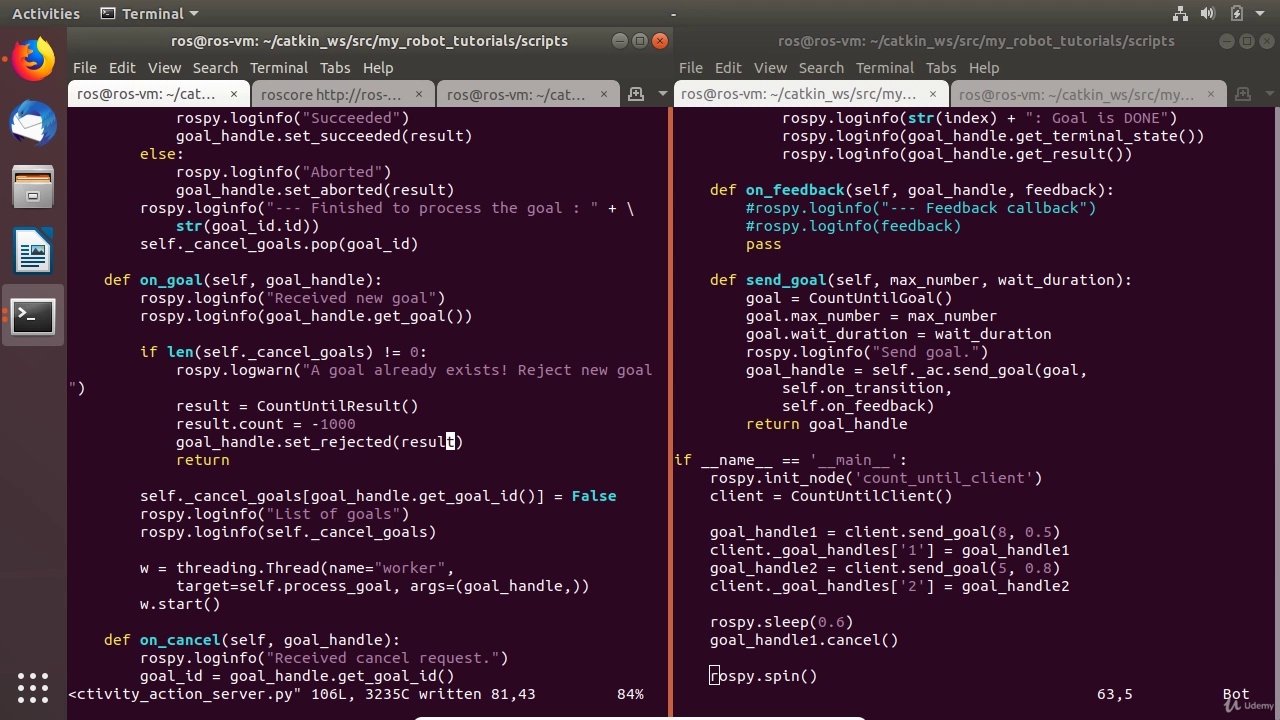
سرور با ActionServer ایجاد کنید
مشتری با ActionClient ایجاد کنید
چندین هدف را ارسال و رسیدگی کنید
سیاست هدف را تغییر دهید
اهداف را در یک صف قرار دهید و آنها را یک به یک اجرا کنید
C ++ - با ActionServer سرور ایجاد کنید
C ++ - با ActionClient مشتری ایجاد کنید
نتیجه گیری بخش
نتیجه گیری:
آنچه آموخته اید
جایزه:
چند نمونه از اقدامات موجود
سخنرانی جایزه
ROS Actions
در این روش نیاز به افزودن محصول به سبد خرید و تکمیل اطلاعات نیست و شما پس از وارد کردن ایمیل خود و طی کردن مراحل پرداخت لینک های دریافت محصولات را در ایمیل خود دریافت خواهید کرد.


آموزش ساخت برنامه های رباتیک بوسیله Robot Operating System 2

پایتون 3 : یادگیری پایه پایتون گام به گام
![ROS2 Nav2 [Navigation 2 Stack] – with SLAM and Navigation](https://farinmedia.ir/farinmedia-img/https://farinmedia.ir/farinmedia-img/images-123/8163.jpgmain-resized.jpg)
ROS2 Nav2 [Navigation 2 Stack] – with SLAM and Navigation

خط فرمان لینوکس

ROS For Beginners (ROS Noetic, Melodic, Kinetic)

Practical Linux Command Line 2.0

Raspberry Pi و Arduino – به سطح بعدی بروید

ROS2 for Beginners Level 3 – Advanced Concepts

آموزش برنامه نویسی ربات ها بوسیله ROS2

Arduino For Beginners – 2023 Complete Course






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}