در حال حاضر محصولی در سبد خرید شما وجود ندارد.

برای ناوبری مبتنی بر مبتنی بر مبتدیان III با Rosbridge به دوره ROS خوش آمدید. من آنیس کوبا هستم و در این دوره مربی شما خواهم بود. این دوره سومین دوره سری ROS برای مبتدیان است. این یک دوره مبتنی بر پروژه است که به نحوه توسعه یک رابط وب برای TELEOPERATE و تعامل با روبات های دارای ROS می پردازد.
عنوان اصلی : Ros Programming And Simulation 3
سرفصل های دوره :
01 نصب و راه اندازی Ros Noetic
02 می فهمید گره ROS چیست
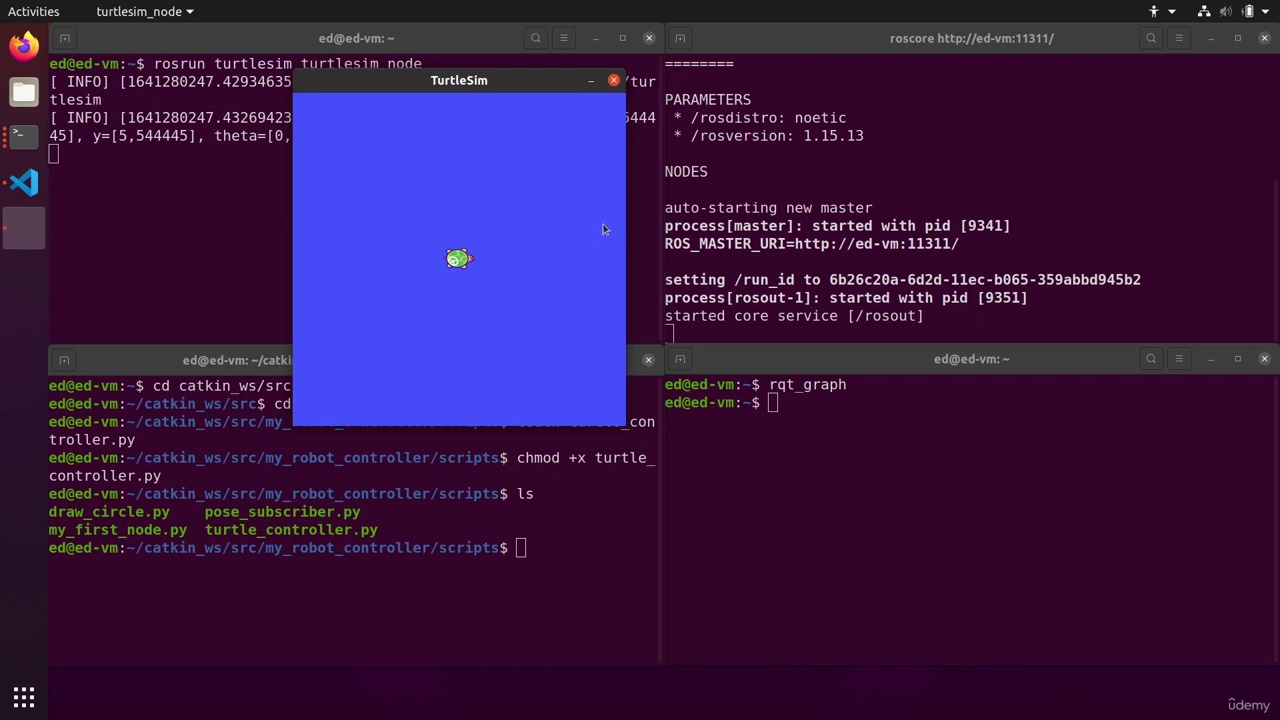
03 فضای کاری catkin را ایجاد و راه اندازی کنید
04 یک بسته ROS ایجاد کنید
05 گره ROS را با پایتون بنویسید
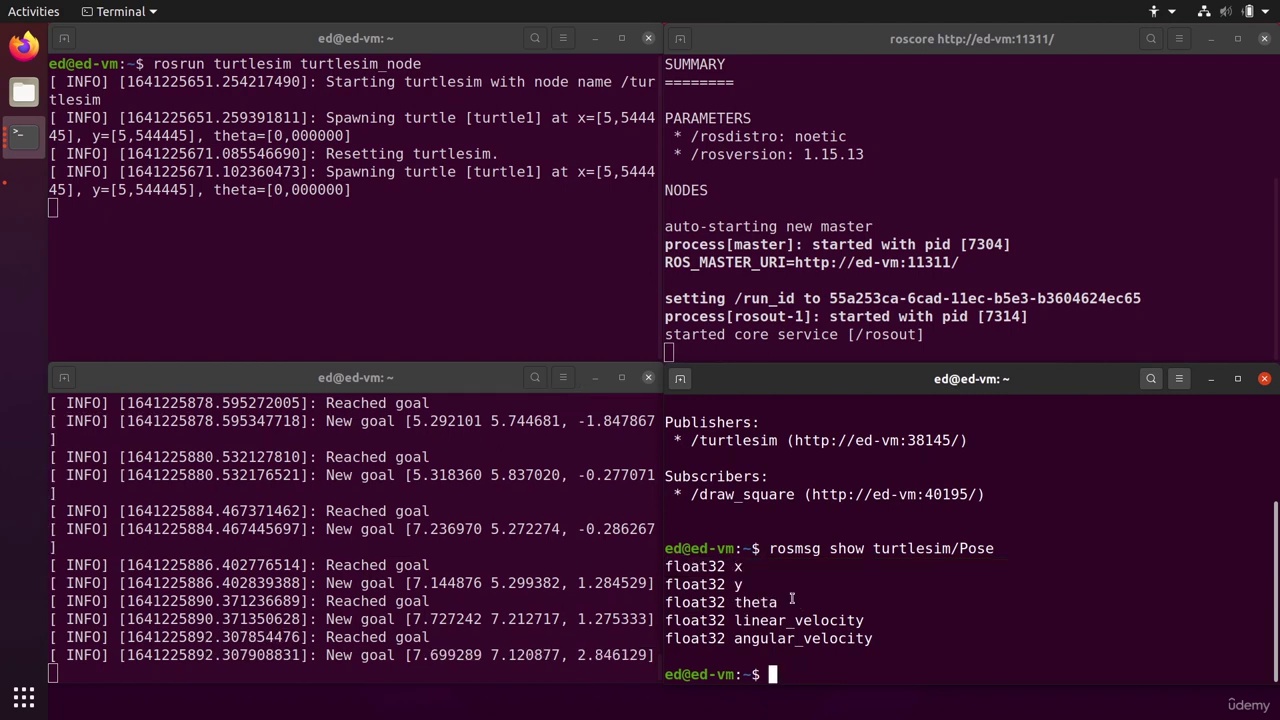
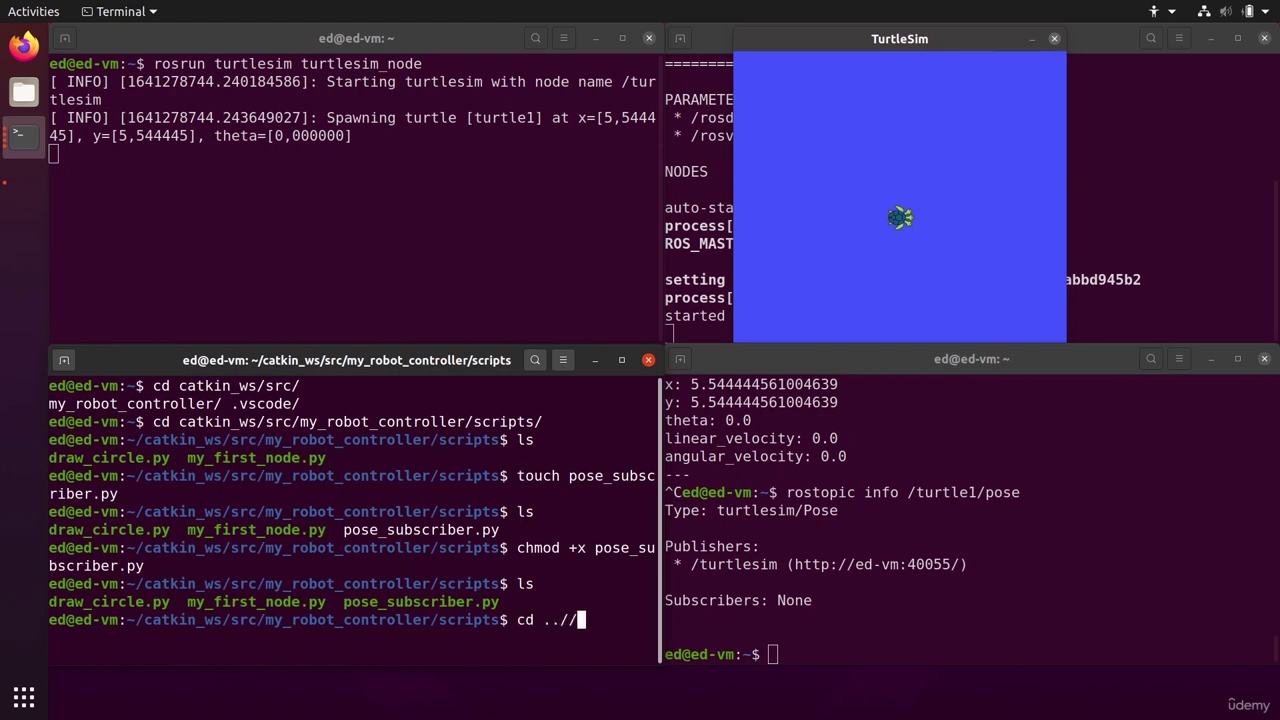
06 بفهمید موضوع ROS چیست
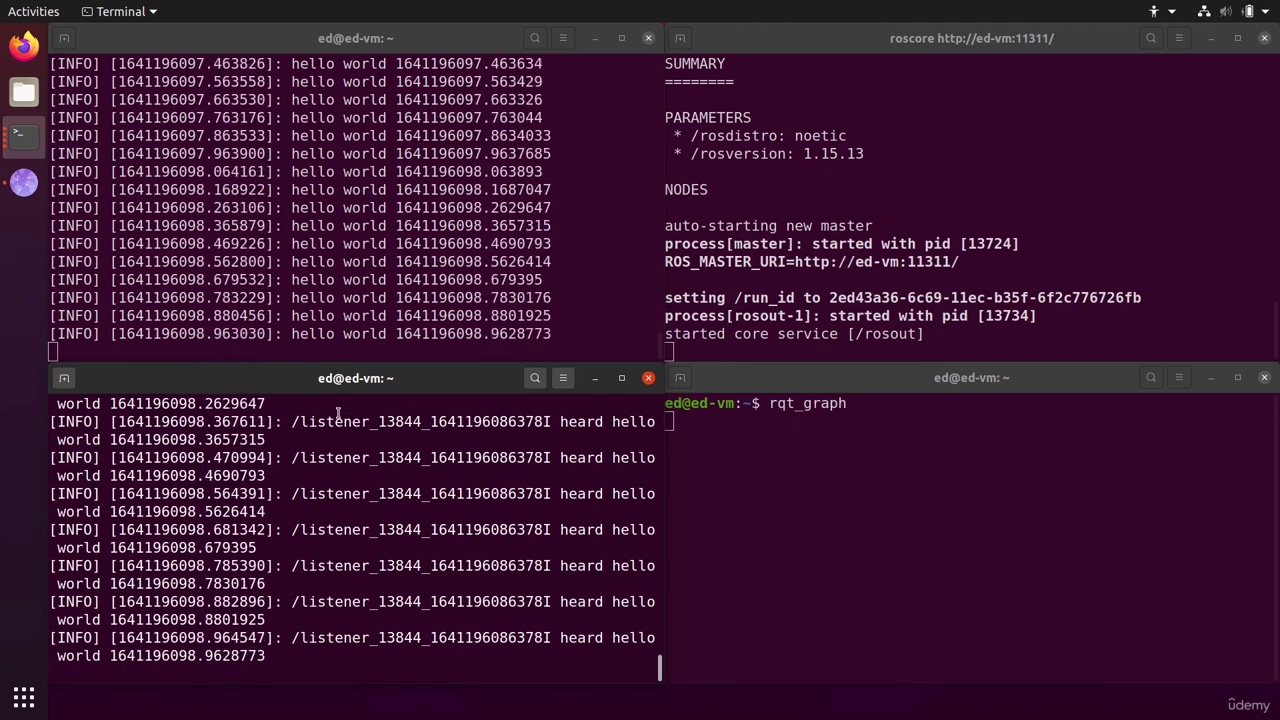
07 یک ناشر ROS با پایتون بنویسید
08 مشترک ROS را با پایتون بنویسید
09 ناشر و مشترک را در یک سیستم حلقه بسته ترکیب کنید
10 بفهمید سرویس ROS چیست
11 یک مشتری سرویس ROS را با پایتون بنویسید
Ros Programming And Simulation 3
در این روش نیاز به افزودن محصول به سبد خرید و تکمیل اطلاعات نیست و شما پس از وارد کردن ایمیل خود و طی کردن مراحل پرداخت لینک های دریافت محصولات را در ایمیل خود دریافت خواهید کرد.


ساخت نمودارهای گانت بوسیله Excel

ساخت تراس پشت بام بوسیله Grasshopper در Rhino

سرویس کانتینر الاستیک آمازون : یادگیری عمیق و پیشرفته

دوره CCIE Cisco Firepower FMCv 7.x
ساخت یک کامیون سه بعدی برای فروش در بازارهای NFT و METAVERSE
مجسمه سازی سطوح سخت بوسیله ZBrush
-main-resized.jpg)
دوره یادگیری کامل CompTIA CySA+ (CS0-002)

دنی اکواریا 5 نکته برای میکس صدای خواننده
تنظیم و اجرای ربات های ماشین کاری
-main-resized.jpg)
ساخت یک کپی از کلاب هاوس بوسیله زبان Go و فریمورک جاوااسکریپت NextJS






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}