در حال حاضر محصولی در سبد خرید شما وجود ندارد.
 به سیستم های Real-Time")
[بنیاد شبکه های خودرو - شبکه منطقه کنترل (CAN) - طراحی سیستم های زمان واقعی - دست راست]
عنوان اصلی : From Controller Area Network (CAN bus) to Real-Time System
سرفصل های دوره :
مقدمه:
می تواند موقعیت فنی باشد
می تواند مشخصات BOSCH A & B
بازگشت قلع می تواند خانمها
می توانید مشخصات BOSCH A & B:
دسترسی رسانه ها
بیت فیزیکی کد فیزیکی
Systellization Bitstream لایه فیزیکی
زمانبندی بیت فیزیکی
ملاحظات لایه فیزیکی - "خوب به دانستن"
ملاحظات لایه فیزیکی - ناخواسته اما بهترین شیوه ها را ایجاد کرده است
فرمت های فریم - فریم های داده
فرمت های فریم - فریم های از راه دور، خطا و بیش از حد
تشخیص خطا
خطای حمل و نقل خطا و گسل
هنگامی که همه چیز به عنوان انتظار نمی رود - برخی از نکات اشکال زدایی
Arduino می تواند دست ها:
نمای کلی و قطعات سخت افزاری
دانلود و نصب کتابخانه Arduino می تواند
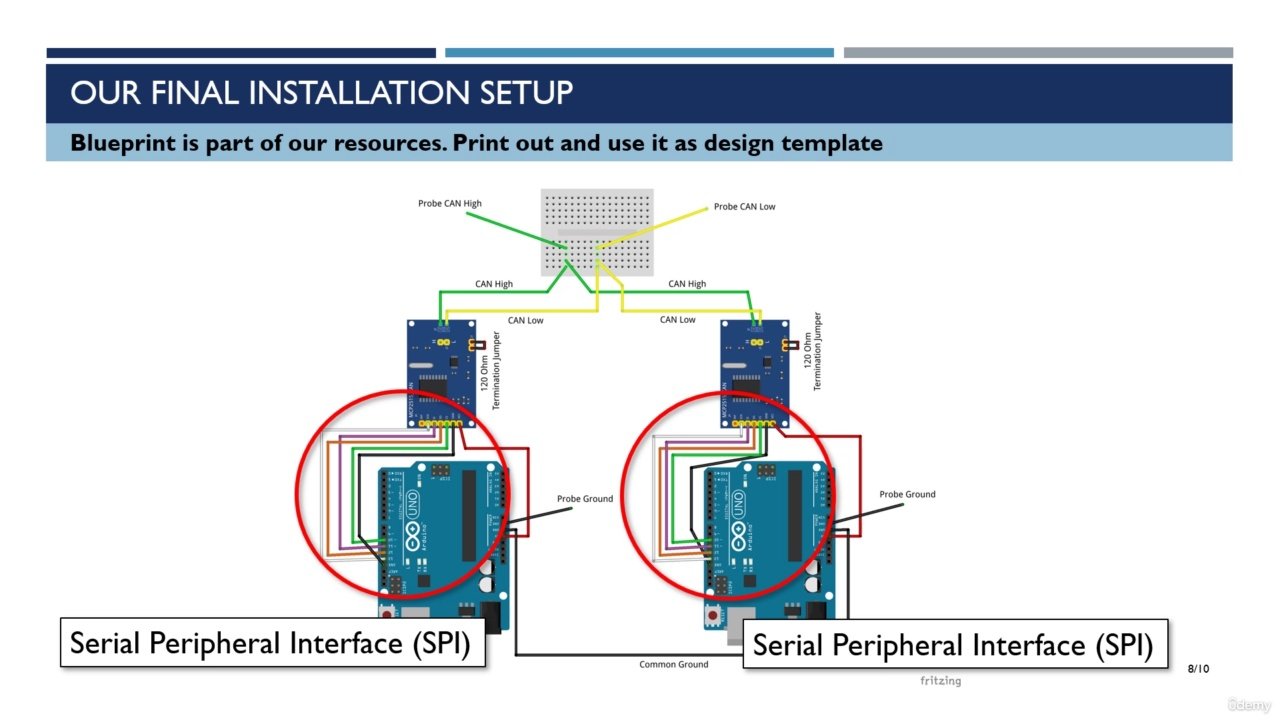
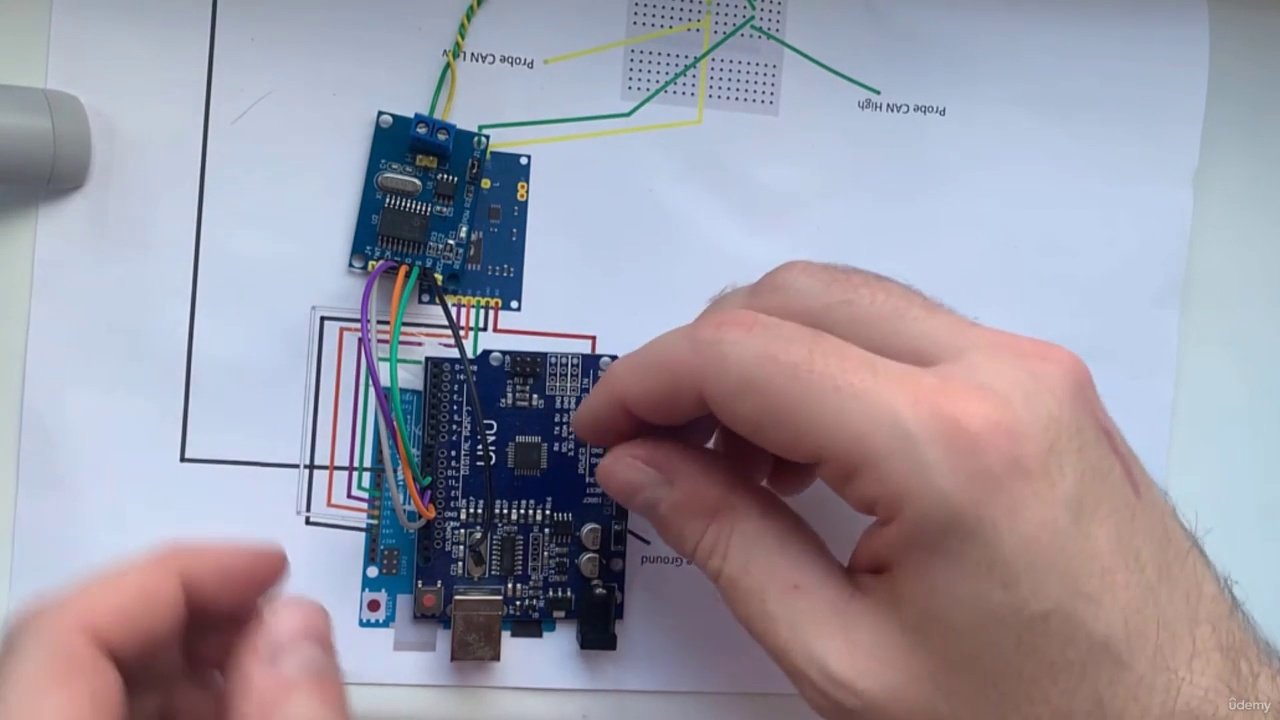
سیم کشی می تواند کنترل کننده به Arduino و راه اندازی شبکه می تواند
نوشتن کد برای گره فرستنده ما
نوشتن کد برای گره گیرنده ما
اجازه دهید آن را آزمایش کنید! اجرای نرم افزار ما در تنظیمات سخت افزاری ما
آیا مشخصات ISO و پسوند:
ISO 11898-1
ISO 11898-2
افزونه های بیشتر ...
ساخت سیستم های زمان واقعی با CAN:
سیستم های زمان واقعی چیست؟
ساخت سیستم های زمان واقعی با CAN
برنامه ریزی می تواند برنامه ریزی - تجزیه و تحلیل زمان بندی و بهینه سازی طراحی
برنامه برنامه نویسی می تواند بخش 1 را داشته باشد
برنامه برنامه نویسی می تواند بخش 2 را داشته باشد
حرفه ای می تواند ابزار طراحی:
طراحی شبکه های پیچیده با شبکه های سرمایه گذاری زیمنس
با استفاده از Candb ++ برای وظایف مشاهده فایل ساده
Can CanberSurity:
خودرو جاسازی شده و می تواند چالش امنیتی
می تواند هک کند
From Controller Area Network (CAN bus) to Real-Time System
در این روش نیاز به افزودن محصول به سبد خرید و تکمیل اطلاعات نیست و شما پس از وارد کردن ایمیل خود و طی کردن مراحل پرداخت لینک های دریافت محصولات را در ایمیل خود دریافت خواهید کرد.

 به سیستم های Real-Time 1")
 به سیستم های Real-Time 2")
 به سیستم های Real-Time 3")
 به سیستم های Real-Time 4")
 به سیستم های Real-Time 5")
 به سیستم های Real-Time 6")
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}