در حال حاضر محصولی در سبد خرید شما وجود ندارد.

در این دوره آموزشی با اتومبیل های خود ران آشنا شده و کدنویسی آن ها را به کمک دید کامپیوتری یا همان Computer Vision یاد می گیرید.
عنوان اصلی : Autonomous Cars: Deep Learning and Computer Vision in Python
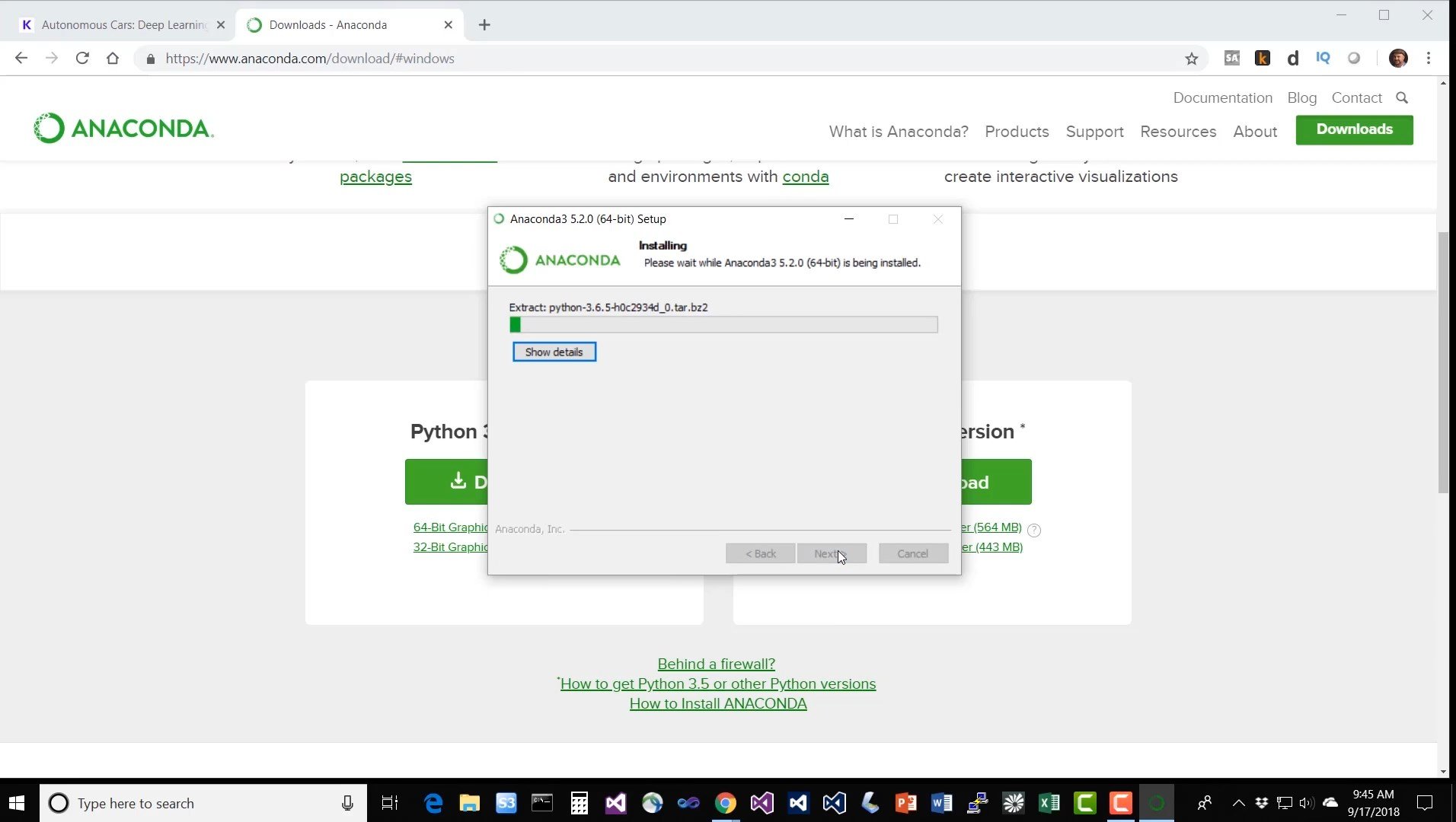
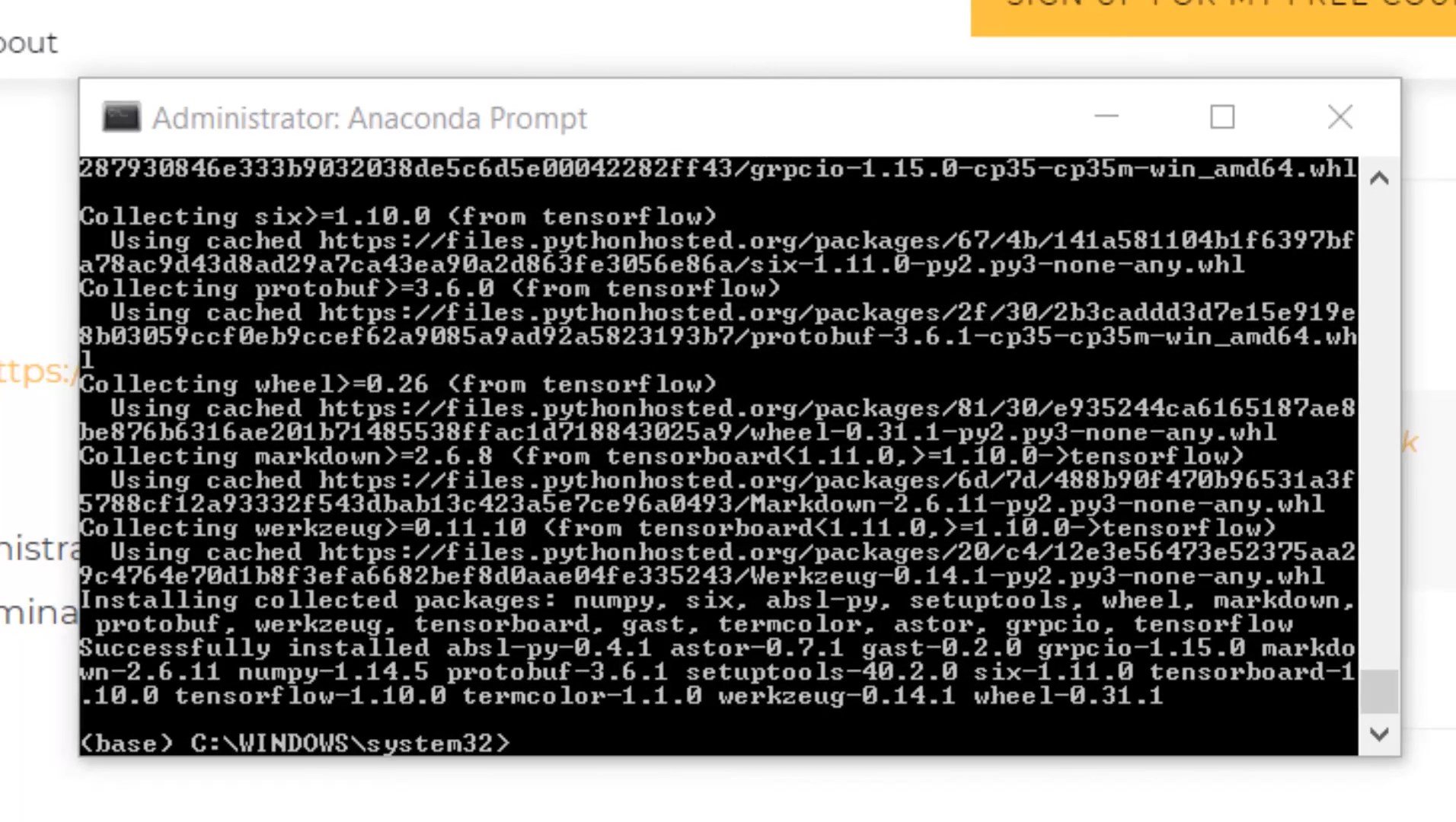
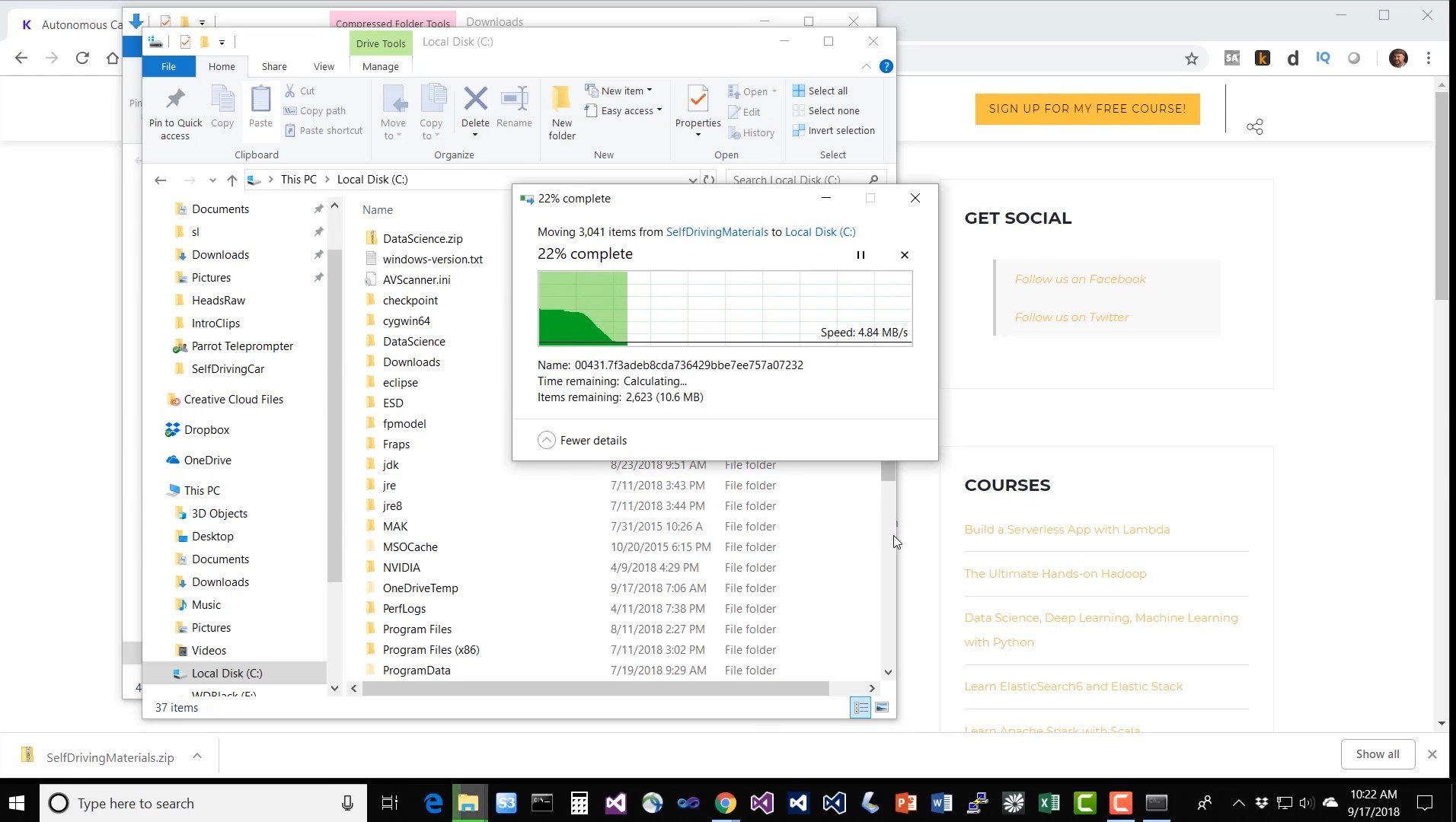
راه اندازی و نصب محیط:
Anaconda، OpenCV، Tensorflow و Course Materials را نصب کنید
محیط خود را با تشخیص لبه بلادرنگ در یک نوت بوک Jupyter آزمایش کنید
آشنایی با خودروهای خودران:
بررسی اجمالی دوره و نتایج یادگیری
دوره سقوط پایتون [اختیاری]:
مبانی پایتون: تاپل ها و دیکشنری ها
مبانی پایتون: توابع و عملیات بولی
مبانی پایتون: حلقه زدن و یک تمرین
آشنایی با پانداها
مقدمه ای بر MatPlotLib
معرفی Seaborn
مبانی بینایی کامپیوتر: بخش 1:
سیستم بینایی انسان در مقابل کامپیوتر
تصویر چیست و چگونه به صورت دیجیتالی ذخیره می شود؟
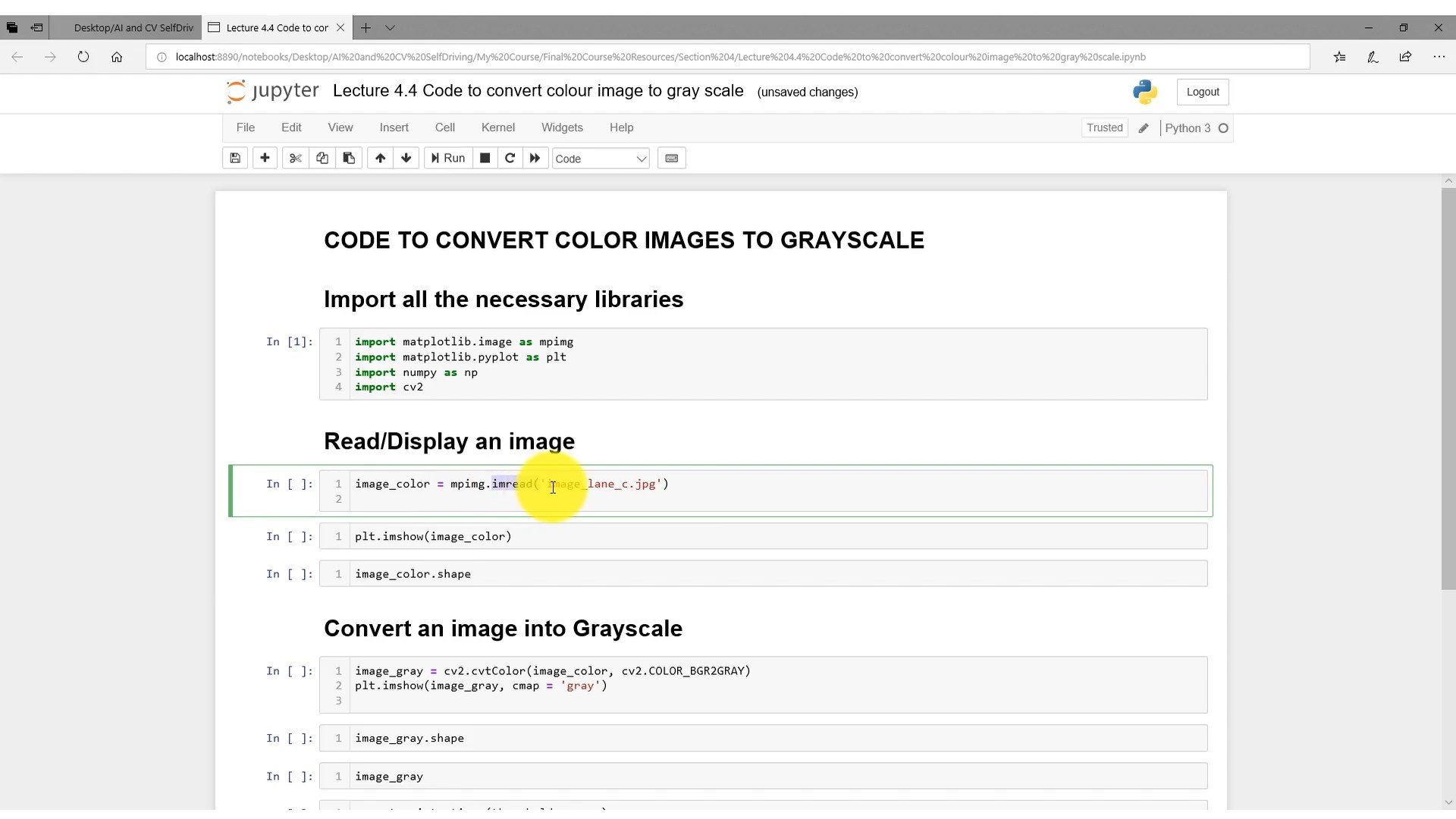
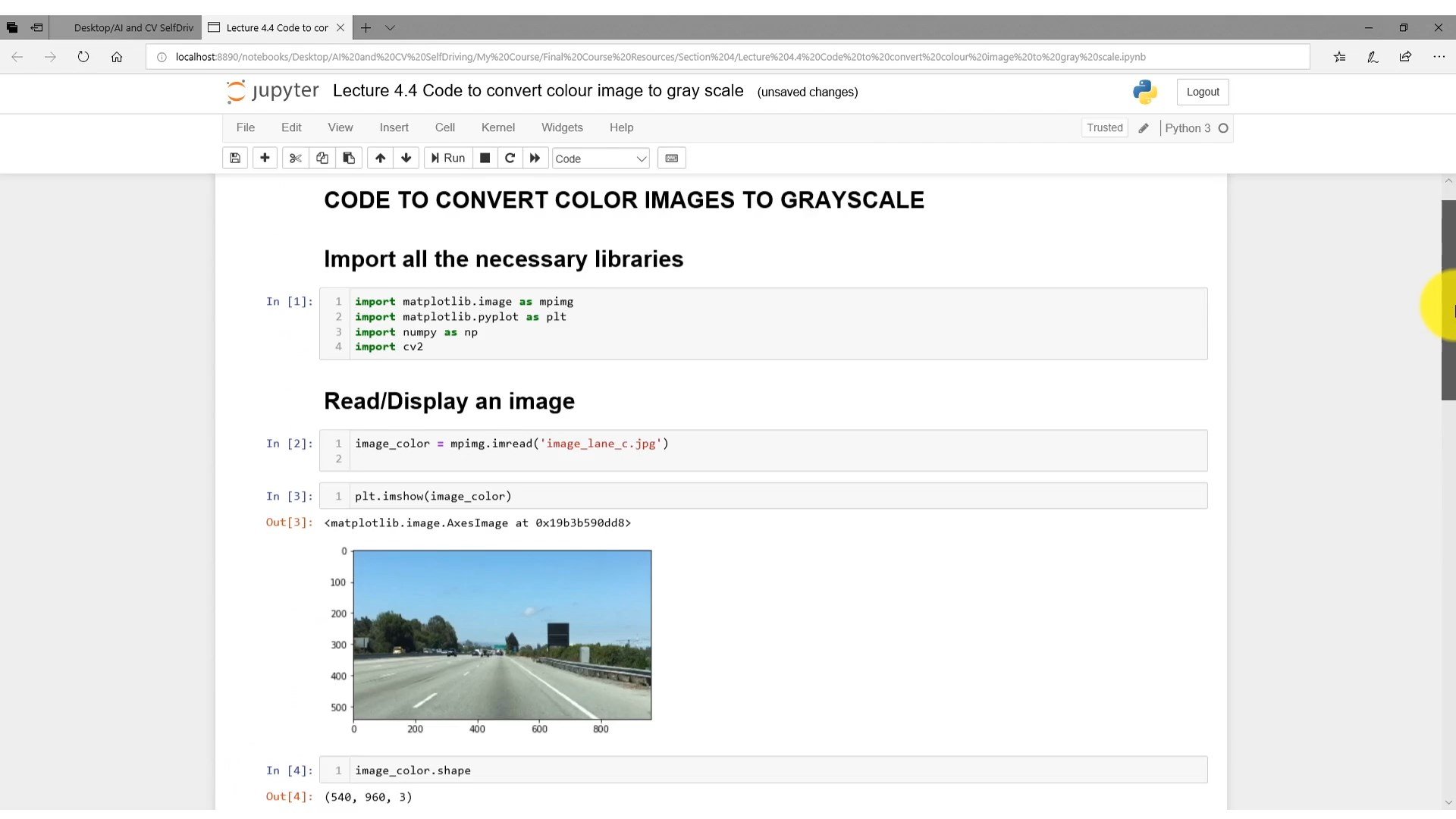
[فعالیت] تصویر رنگی را مشاهده کنید و RGB را به خاکستری تبدیل کنید
[فعالیت] تشخیص خطوط خطوط در تصویر مقیاس خاکستری
[فعالیت] تشخیص خطوط خطوط در تصویر رنگی
چالش های تکنیک انتخاب رنگ چیست؟
فضاهای رنگی
[فعالیت] فضاهای رنگی RGB را به HSV تبدیل کنید و کانال ها را ادغام/تقسیم کنید
پیچش - تیز کردن و تاری
[فعالیت] پیچیدگی - تیز کردن و محو کردن
تشخیص لبه و محاسبات گرادیان (Sobel، Laplace و Canny)
[فعالیت] تشخیص لبه و محاسبات گرادیان (Sobel، Laplace و Canny)
[فعالیت] پروژه شماره 1: Canny Sobel و Laplace Edge Detection با استفاده از وب کم
مبانی بینایی کامپیوتر: قسمت 2:
[فعالیت] کد برای انجام چرخش، ترجمه و تغییر اندازه
تبدیل تصویر - تبدیل چشم انداز
[فعالیت] تبدیل تصویر غیر وابسته را روی یک تصویر علائم راهنمایی و رانندگی انجام دهید
اتساع و فرسایش برش تصویر
[فعالیت] کد برای انجام اتساع و فرسایش برش تصویر
پوشش منطقه مورد علاقه
[فعالیت] کد برای تعریف منطقه مورد علاقه
نظریه تبدیل هاف
[فعالیت] تبدیل Hough - مثال عملی در پایتون
راه حل پروژه: تبدیل Hough برای تشخیص خطوط خطوط در یک تصویر
مبانی بینایی کامپیوتر: قسمت 3:
[فعالیت] یک کامیون را در یک تصویر به صورت دستی پیدا کنید!
تطبیق الگو - یک کامیون پیدا کنید
[فعالیت] راه حل پروژه: با استفاده از تطبیق الگو، یک کامیون پیدا کنید
تشخیص گوشه - هریس
[فعالیت] کد برای انجام تشخیص گوشه
مقیاس تصویر - هرمی بالا/پایین
[فعالیت] کد برای اجرای هرم تصویر
هیستوگرام رنگ ها
[فعالیت] کد برای به دست آوردن هیستوگرام رنگی
هیستوگرام گرادیان های جهت دار (HOG)
[فعالیت] کد برای انجام استخراج ویژگی HOG
استخراج ویژگی - SIFT، SURF، FAST و ORB
[فعالیت] استخراج ویژگی FAST/ORB در OpenCV
یادگیری ماشینی: قسمت 1:
ارزیابی سیستمهای یادگیری ماشین با اعتبارسنجی متقابل
رگرسیون خطی
[فعالیت] رگرسیون خطی در عمل
رگرسیون لجستیک
[فعالیت] رگرسیون لجستیک در عمل
درختان تصمیم و جنگل های تصادفی
[فعالیت] درختان تصمیم در عمل
یادگیری ماشینی: قسمت 2:
[فعالیت] ساده لوح بیز در عمل
ماشینهای بردار پشتیبانی (SVM) و دستهبندیکنندههای بردار پشتیبانی (SVC)
[فعالیت] پشتیبانی از طبقهبندیکنندههای برداری در عمل
راه حل پروژه: تشخیص اتومبیل ها با استفاده از SVM - قسمت شماره 1
[فعالیت] تشخیص اتومبیل ها با استفاده از SVM - قسمت شماره 2
[فعالیت] راهحل پروژه: شناسایی اتومبیلها با استفاده از SVM - قسمت #3
شبکه های عصبی مصنوعی:
مدل پرسپترون تک نورون
توابع فعال سازی
آموزش ANN و تقسیم داده ها
مثال عملی - تعیین سرعت خودرو
کد برای ساخت یک پرسپترون برای طبقه بندی باینری
آموزش پس تکثیر
کد برای آموزش یک پرسپترون برای طبقه بندی باینری
دو و چند لایه پرسپترون ANN
مثال 1 - ساخت پرسپترون چند لایه برای طبقه بندی باینری
مثال 2 - ساخت پرسپترون چند لایه برای طبقه بندی باینری
یادگیری عمیق و تنسورفلو: قسمت 1:
ساخت شبکه های عصبی عمیق با کراس، عادی سازی و رمزگذاری یک داغ.
[فعالیت] ساخت یک طبقه بندی لجستیک با یادگیری عمیق و Keras
فعالسازی ReLU و جلوگیری از تطبیق بیش از حد با منظمسازی خروج
[فعالیت] بهبود طبقهبندیکننده ما با منظمسازی حذف
یادگیری عمیق و تنسورفلو: قسمت 2:
پیاده سازی CNN در کراس
[فعالیت] طبقه بندی تصاویر با یک CNN ساده، قسمت 1
[فعالیت] طبقه بندی تصاویر با یک CNN ساده، قسمت 2
حداکثر پولینگ
[فعالیت] بهبود توپولوژی CNN و با Max Pooling
Autonomous Cars: Deep Learning and Computer Vision in Python
در این روش نیاز به افزودن محصول به سبد خرید و تکمیل اطلاعات نیست و شما پس از وارد کردن ایمیل خود و طی کردن مراحل پرداخت لینک های دریافت محصولات را در ایمیل خود دریافت خواهید کرد.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}