جمع جزء: 567,000 تومان
- × 1 عدد: کورس یادگیری Microsoft Azure Solutions Architect Design Governance - 189,000 تومان
- × 1 عدد: آموزش برخورد با یک مدیر وسواسی ( جز نگر ) - 189,000 تومان
- × 1 عدد: آموزش اجتناب از اشتباهات در Data Science - 189,000 تومان
با مشاهده این کورس آموزشی از طریق انجام پروژه های واقعی و به زبانی بسیار ساده مطالب فراوانی را در رابطه با ساخت ربات ها یاد می گیرید.
عنوان اصلی : ROS2 For Beginners - Build Robotics Applications with Robot Operating System 2
1. معرفی
2. ROS2 چیست، چه زمانی از آن استفاده کنیم و چرا؟
3. نکاتی برای شروع کلاس
4. ROS2 را نصب کرده و محیط خود را راه اندازی کنید
5. از کدام توزیع ROS2 استفاده شود
6. اوبونتو 20.04 را روی یک ماشین مجازی نصب کنید
7. ابزارهای برنامه نویسی که در این دوره استفاده می کنم
8. ROS2 Foxy Fitzroy را روی اوبونتو 20.04 نصب کنید
9. محیط خود را برای ROS2 تنظیم کنید
10. یک برنامه ROS2 راه اندازی کنید!
11. اولین برنامه ROS2 خود را بنویسید
12. ROS2 Build Tool - colcon را نصب کنید
13. یک فضای کاری ROS2 ایجاد کنید
14. یک بسته پایتون ایجاد کنید
15. یک بسته C++ ایجاد کنید
16. گره ROS2 چیست؟
17. یک گره پایتون - کد حداقلی بنویسید
18. یک گره پایتون بنویسید - با OOP
19. یک گره C++ - حداقل کد بنویسید
20. یک گره ++C بنویسید - با OOP
21. الگوی OOP برای گره های شما
22. اطلاعات بیشتر درباره کتابخانه های مشتری ROS2 برای زبان های مختلف
23. مقدمه ای بر ابزار ROS2
24. با ros2 cli گره های خود را اشکال زدایی و نظارت کنید
25. تغییر نام یک گره در زمان اجرا
26. کولکن
27. Rqt و rqt_graph
28. Turtlesim را کشف کنید
29. فعالیت 001 - گره ها و ابزار ROS2
30. فعالیت 001 - حل
31. موضوعات ROS2 - گره های خود را با هم ارتباط برقرار کنید
32. موضوع ROS2 چیست؟
33. یک ناشر پایتون بنویسید
34. یک مشترک پایتون بنویسید
35. یک ناشر C++ بنویسید
36. یک مشترک C++ بنویسید
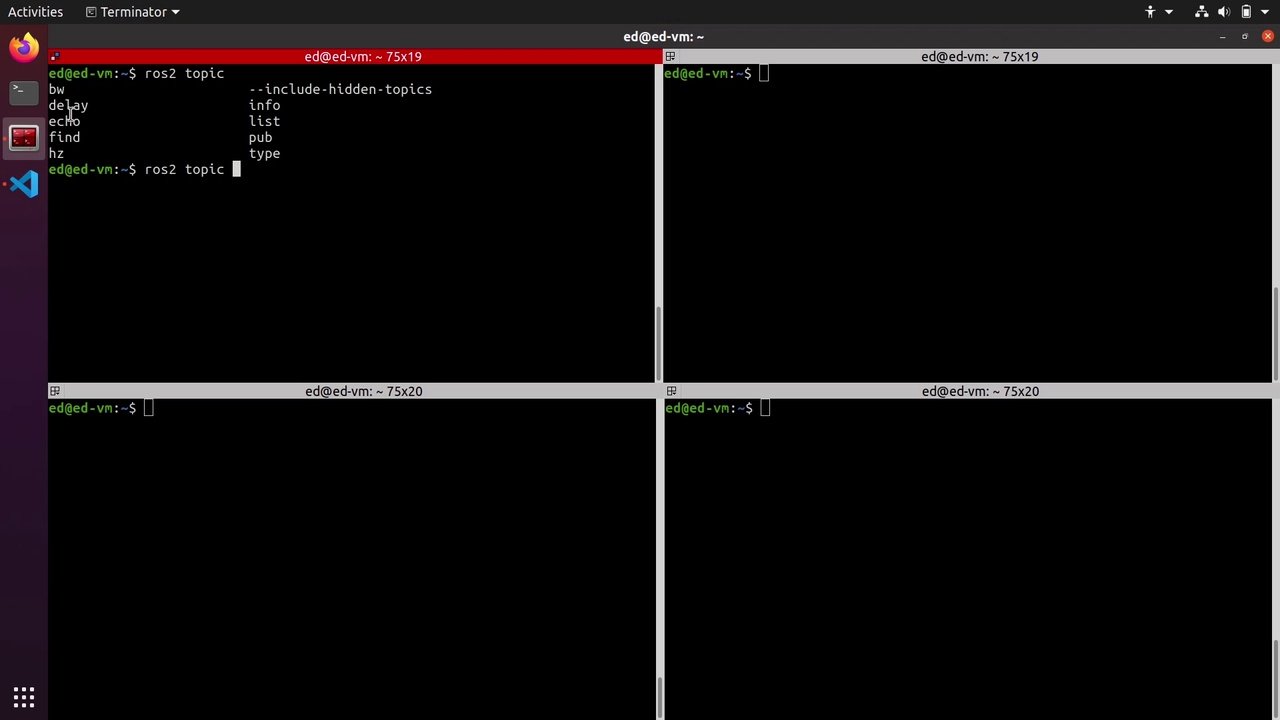
37. موضوعات را با ابزارهای خط فرمان رفع اشکال کنید
38. یک موضوع را در زمان اجرا مجدداً نقشه برداری کنید
39. مانیتور موضوعات با rqt و rqt_graph
40. روی موضوعات با Turtlesim آزمایش کنید
41. فعالیت 002 - موضوعات ROS2
42. فعالیت 002 - راه حل [1/2]
43. فعالیت 002 - راه حل [2/2]
44. خدمات ROS2 - تعاملات مشتری/سرور بین گره ها
45. سرویس ROS2 چیست؟
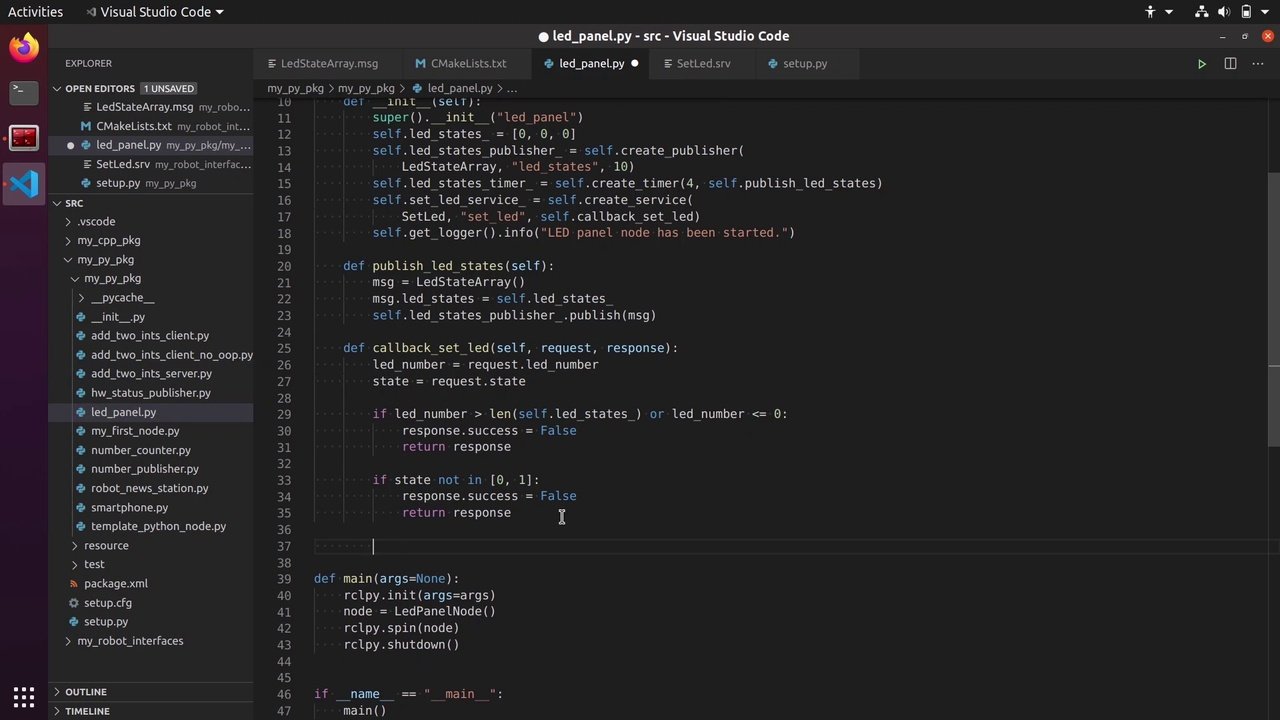
46. یک سرور سرویس پایتون بنویسید
47. یک سرویس گیرنده پایتون بنویسید - بدون OOP
48. یک سرویس گیرنده پایتون بنویسید - OOP
49. یک سرور سرویس C++ بنویسید
50. یک سرویس گیرنده C++ بنویسید - بدون OOP
51. یک سرویس گیرنده C++ بنویسید - OOP
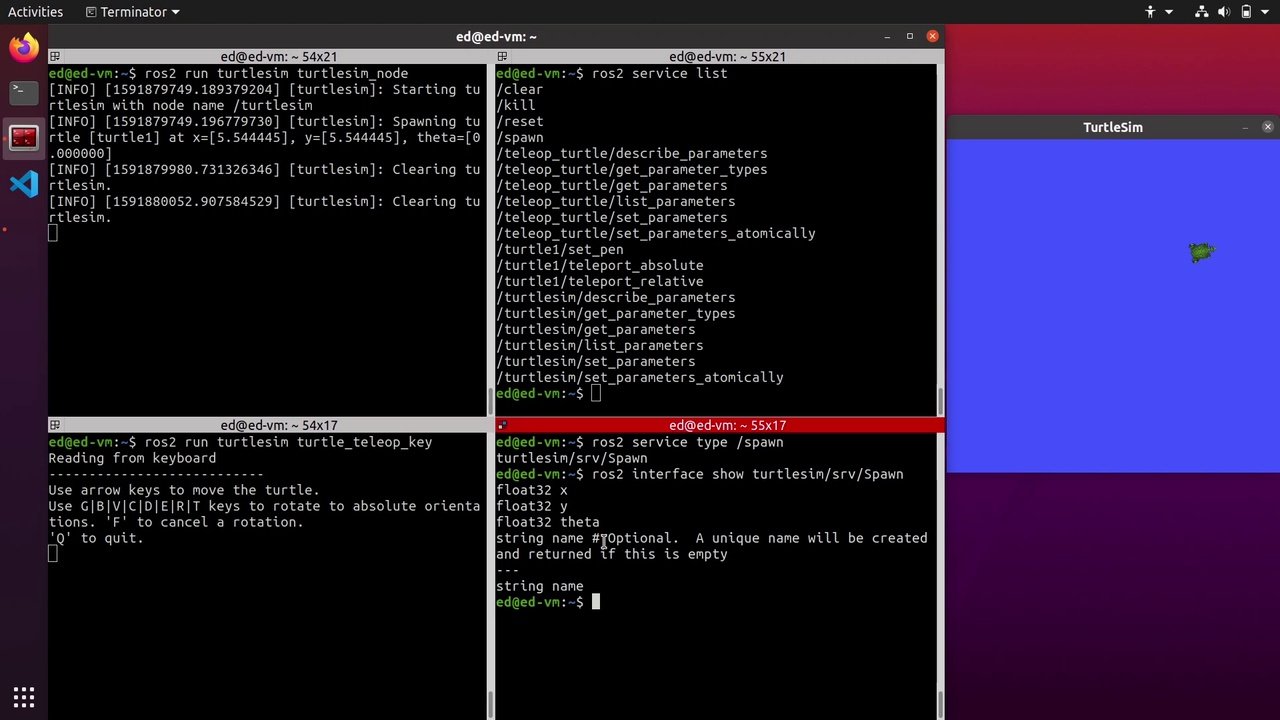
52. Debug Services با ابزار ROS2
53. یک سرویس را در زمان اجرا مجدداً نقشه برداری کنید
54. خدمات را با Turtlesim آزمایش کنید
55. فعالیت 003 - خدمات ROS2
56. فعالیت 003 - حل
57. ایجاد رابط های سفارشی ROS2 (Msg و Srv)
58. رابط های ROS2 چیست؟
59. اولین پیام سفارشی خود را ایجاد و بسازید
60. از پیام سفارشی خود در گره پایتون استفاده کنید
61. از پیام سفارشی خود در گره C++ استفاده کنید
62. اولین Srv سفارشی خود را ایجاد و بسازید
63. Msg و Srv را با ابزار ROS2 اشکال زدایی کنید
64. فعالیت 004 - رابط های سفارشی
65. فعالیت 004 - راه حل [1/3]
66. فعالیت 004 - راه حل [2/3]
67. فعالیت 004 - راه حل [3/3]
68. پارامترهای ROS2 - تنظیمات Node را در زمان اجرا تغییر دهید
69. پارامتر ROS2 چیست؟
70. پارامترهای خود را اعلام کنید
71. پارامترها را از گره پایتون دریافت کنید
72. پارامترها را از یک گره C++ دریافت کنید
73. فعالیت 005 - پارامترهای ROS2
74. فعالیت 005 - راه حل [1/2]
75. فعالیت 005 - راه حل [2/2]
76. فایل های راه اندازی ROS2 - مقیاس برنامه خود را
77. فایل راه اندازی ROS2 چیست؟
78. یک فایل راه اندازی ایجاد و نصب کنید
79. گره های خود را در یک فایل راه اندازی پیکربندی کنید
80. فعالیت 006 - فایل های راه اندازی ROS2
81. فعالیت 006 - حل
82. پروژه Turtlesim - دستورالعمل
83. پروژه Turtlesim - مرحله 1/6
84. پروژه Turtlesim - مرحله 2/6
85. پروژه Turtlesim - مرحله 3/6
86. پروژه Turtlesim - مرحله 4/6
87. پروژه Turtlesim - مرحله 5/6
88. پروژه Turtlesim - مرحله 6/6
89. آنچه شما آموخته اید
90. بعد چه باید کرد؟
ROS2 For Beginners - Build Robotics Applications with Robot Operating System 2
در این روش نیاز به افزودن محصول به سبد خرید و تکمیل اطلاعات نیست و شما پس از وارد کردن ایمیل خود و طی کردن مراحل پرداخت لینک های دریافت محصولات را در ایمیل خود دریافت خواهید کرد.


آموزش برنامه نویسی ربات ها بوسیله ROS2

Practical Linux Command Line 2.0

ROS2 for Beginners Level 3 – Advanced Concepts
![ROS2 Nav2 [Navigation 2 Stack] – with SLAM and Navigation](https://farinmedia.ir/farinmedia-img/https://farinmedia.ir/farinmedia-img/images-123/8163.jpgmain-resized.jpg)
ROS2 Nav2 [Navigation 2 Stack] – with SLAM and Navigation

پایتون 3 : یادگیری پایه پایتون گام به گام

Arduino For Beginners – 2023 Complete Course

ROS For Beginners (ROS Noetic, Melodic, Kinetic)

ROS2 for Beginners Level 2 – TF | URDF | RViz | Gazebo
✨ تا ۷۰% تخفیف با شارژ کیف پول 🎁
مشاهده پلن ها







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}