در حال حاضر محصولی در سبد خرید شما وجود ندارد.

در این مجموعه آموزش با امکانات و قابلیت های جدید ارائه شده در ROS 2 آشنا شده و همراه با مدرس دوره از آن ها در پروژه های واقعی استفاده خواهید کرد.
عنوان اصلی : ROS 2 New Features
شروع کار با ROS 2 و تنظیم محیط:
بررسی اجمالی دوره
ROS 2 چیست؟
شبیه سازی با ROS 2
تفاوت بین ROS 1 و ROS 2
مسترکلاس DDS
نصب ROS 2
ابزار ساخت: Colcon
نصب پکیج های جدید
با استفاده از داکر
کار با رابط خط فرمان:
گره ها
موضوعات
پیام ها
فایل ها را راه اندازی کنید
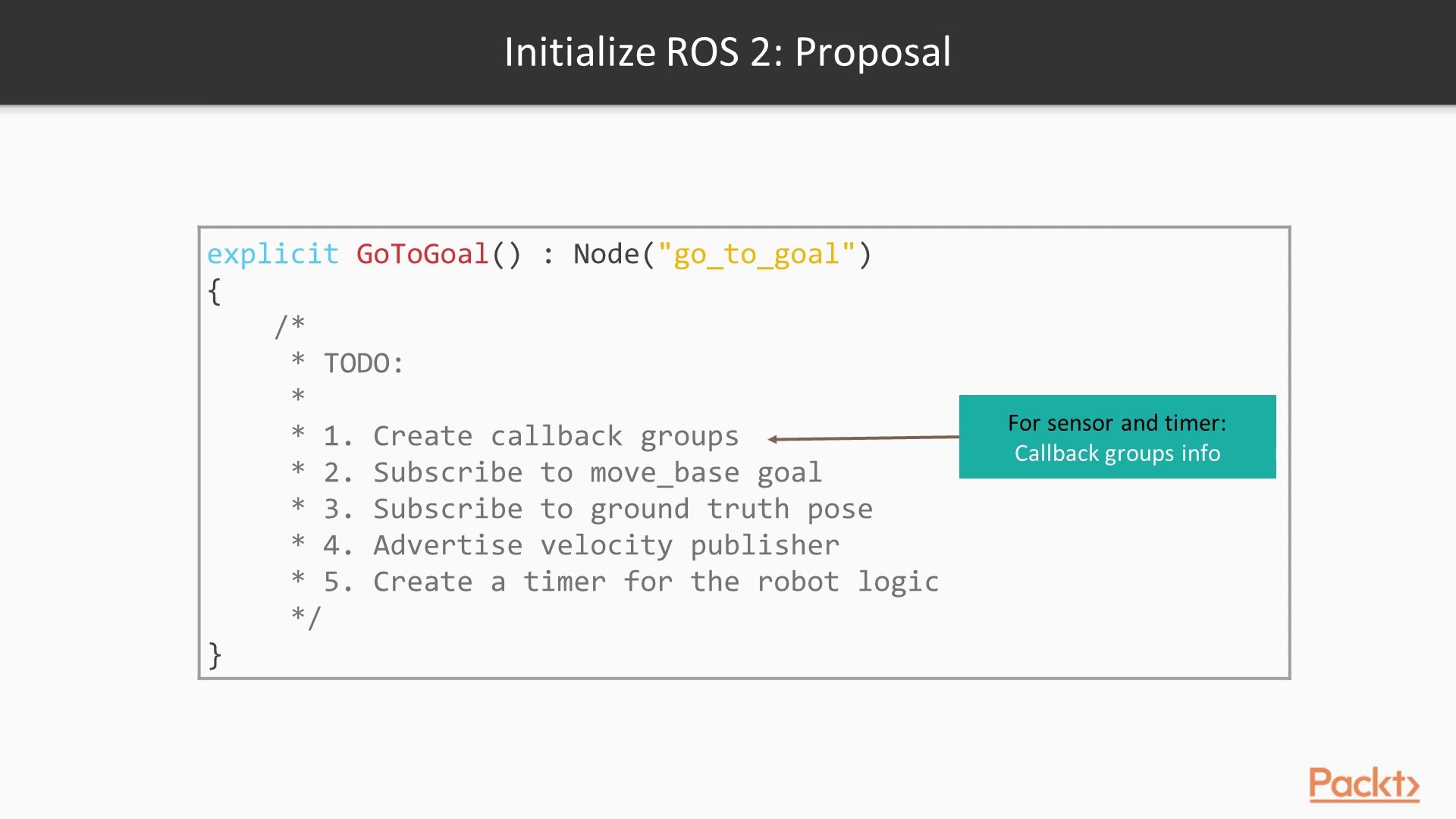
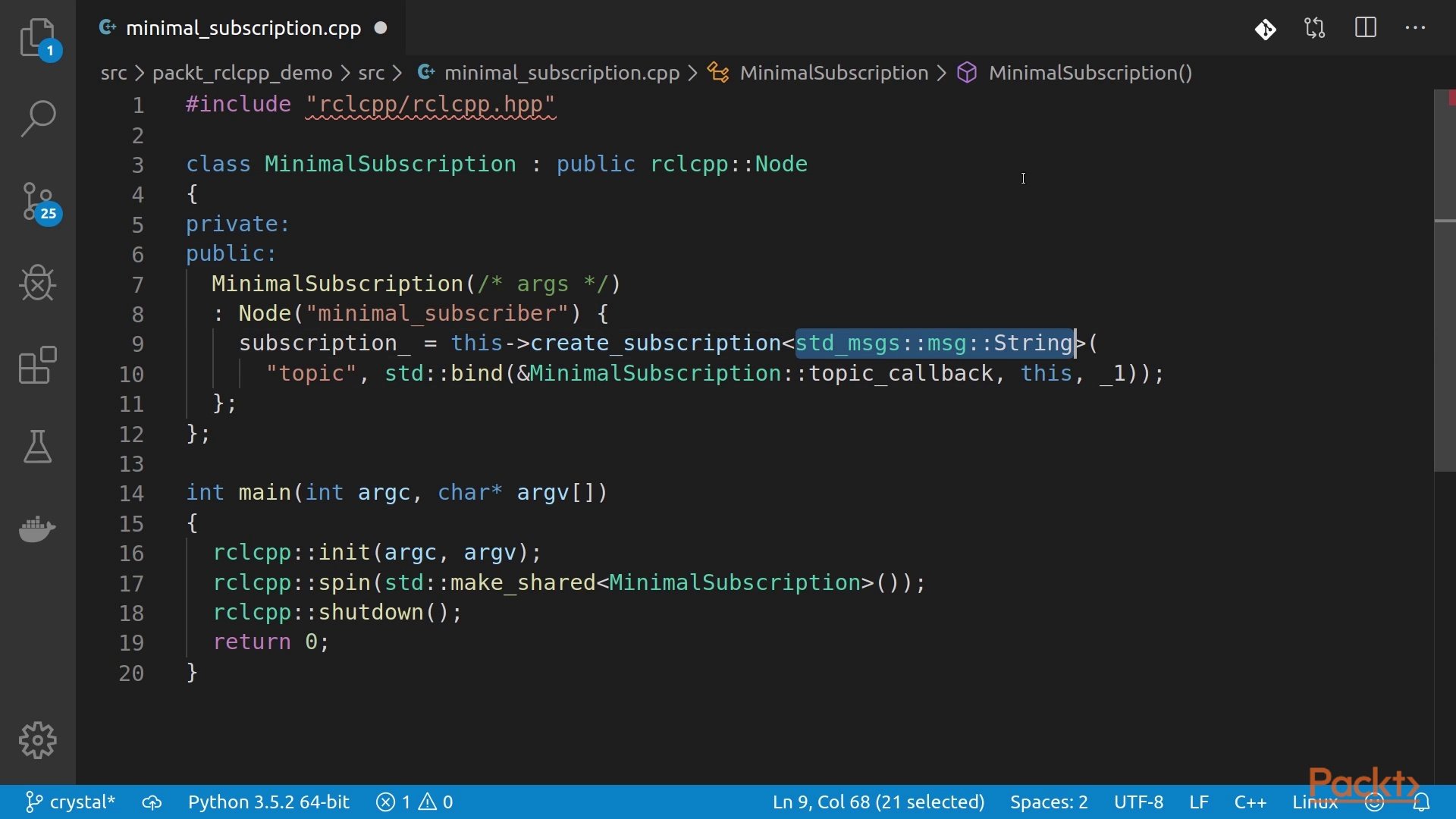
کار با کتابخانه مشتری:
ایجاد ناشر در پایتون
ایجاد مشترک در پایتون
ایجاد Publisher در C++
ایجاد مشترک در C++
ایجاد یک مجری سفارشی در پایتون
کار با Composition در C++
اجزای ROS 2 Dashing
ویژگی های جدید ROS 2:
امنیت
کیفیت خدمات
مدیریت چرخه حیات
کدگذاری بلادرنگ
ابزارهای رفع اشکال و انجمن:
RViz 2
RQt
گفتمان ROS
پاسخ های ROS
کار با Gazebo Simulator:
نصب Gazebo
رابط ROS 2 و Gazebo
پلاگین Gazebo در ROS 2
اجرای گره ROS 2 با Gazebo
ایجاد یک گره کنترلی ROS 2
ROS 2 New Features
در این روش نیاز به افزودن محصول به سبد خرید و تکمیل اطلاعات نیست و شما پس از وارد کردن ایمیل خود و طی کردن مراحل پرداخت لینک های دریافت محصولات را در ایمیل خود دریافت خواهید کرد.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}