در حال حاضر محصولی در سبد خرید شما وجود ندارد.
")
با کنترل Moveit و ROS یک بازوی ربات به زندگی بیاورید!
عنوان اصلی : Complete Guide: Making a hardware interface for MoveIt
سرفصل های دوره :
مقدمه و تنظیم:
مقدمه
با استفاده از دستیار راه اندازی MoveIt
ایجاد رابط سخت افزاری:
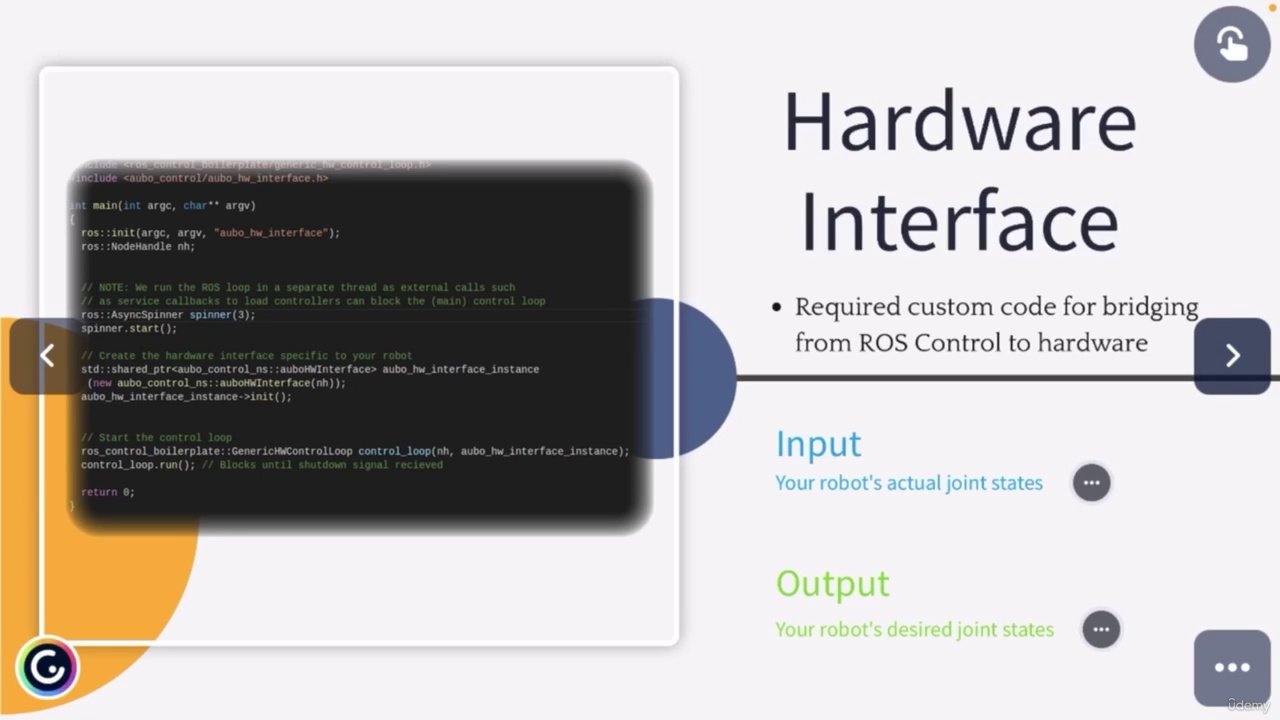
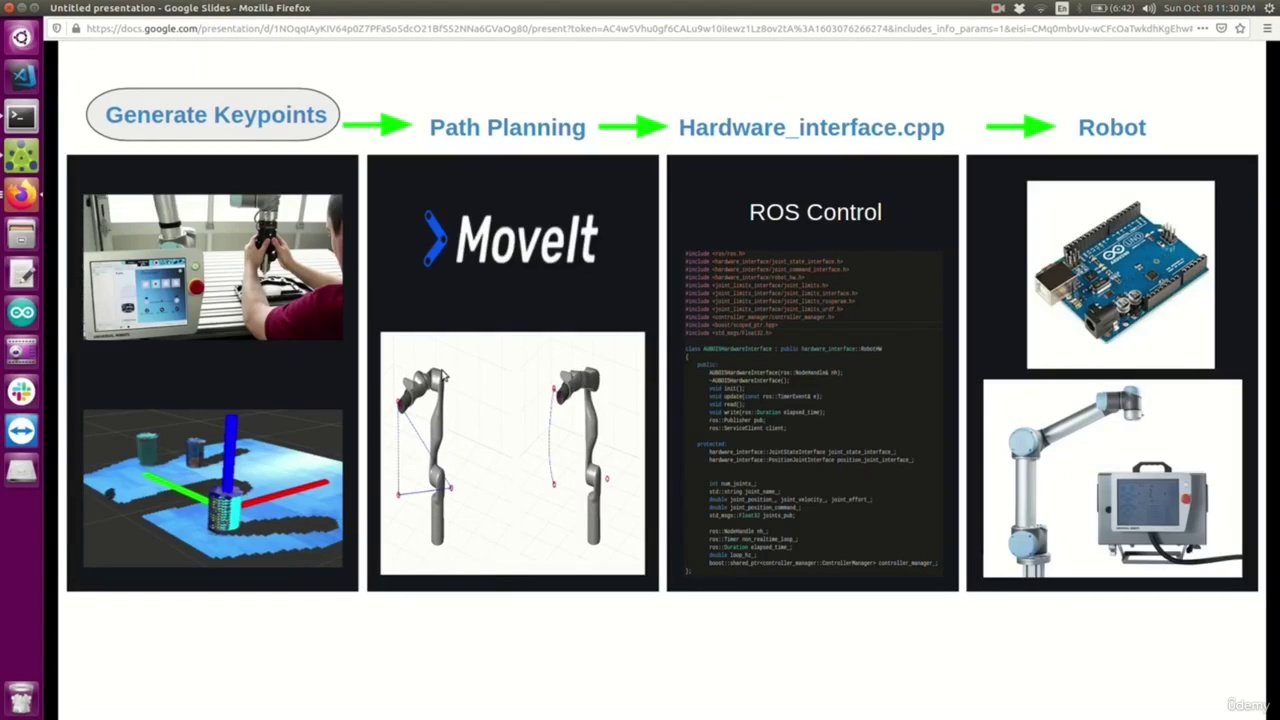
بررسی اجمالی رابط سخت افزار ROS
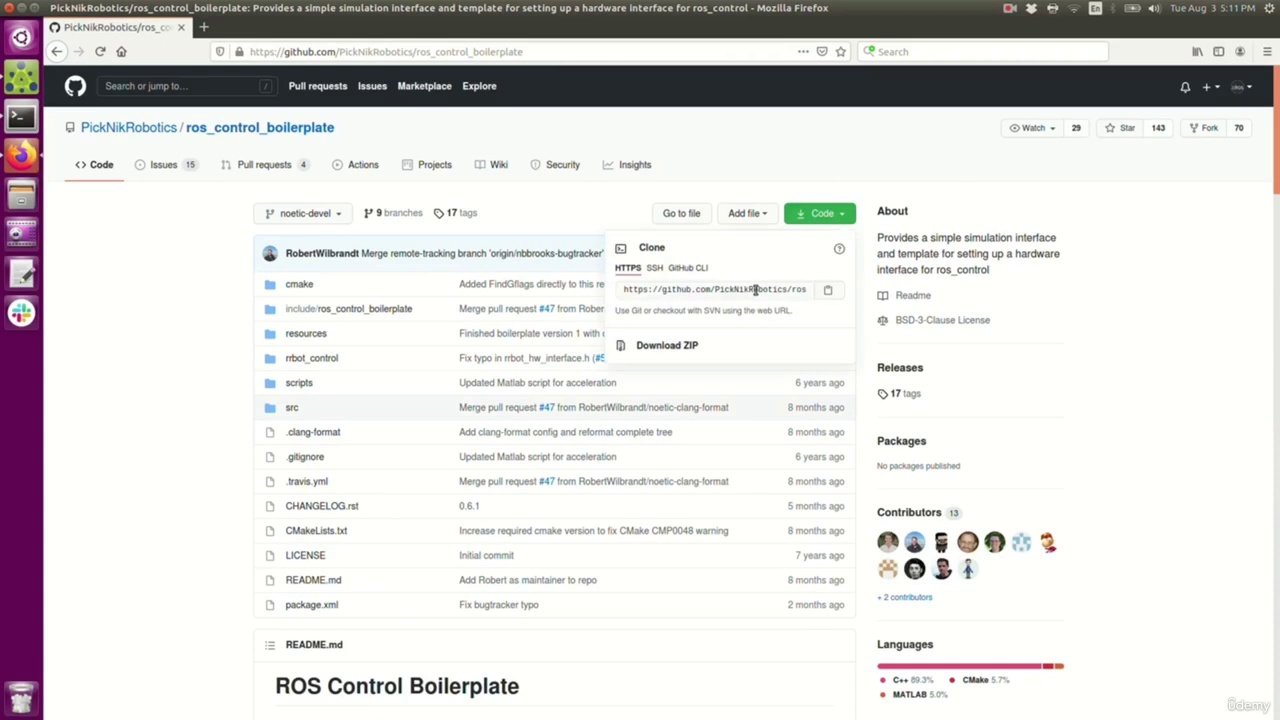
نصب رابط سخت افزار و نمای کلی
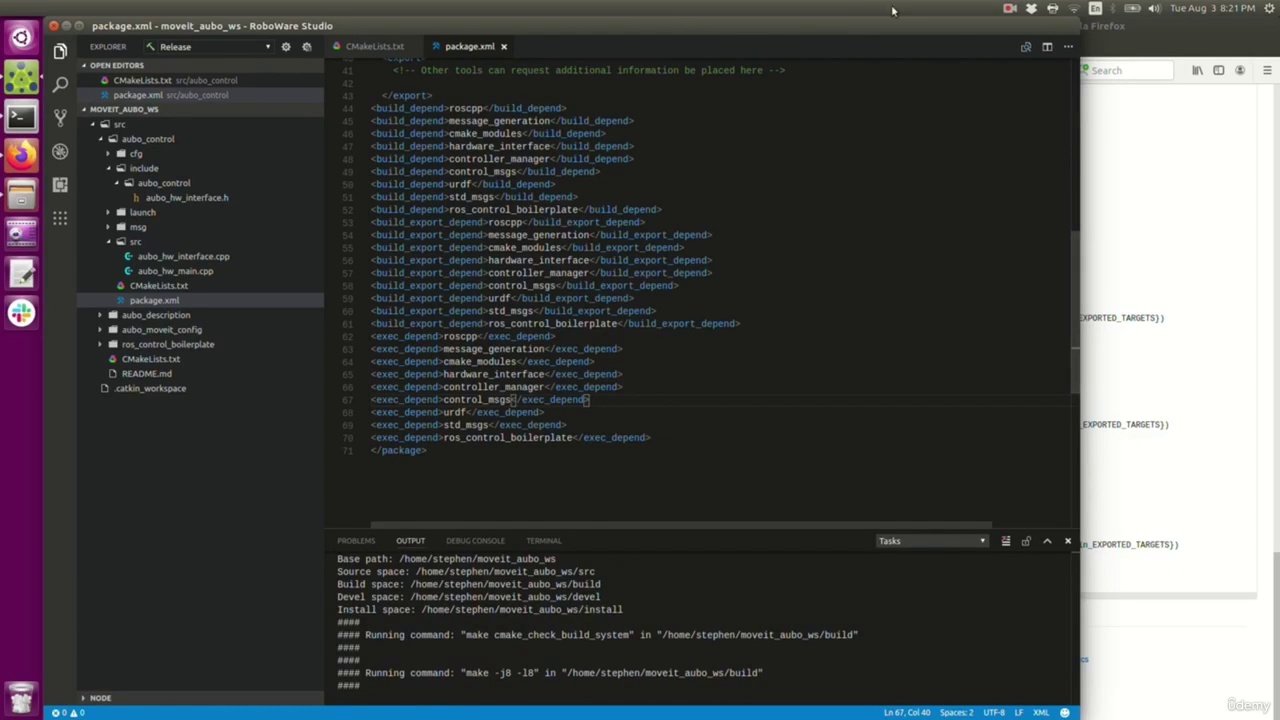
ایجاد H.W. بسته رابط
ایجاد کلاس رابط سخت افزار
ایجاد اصلی و کامپایل
اضافه کردن پیام های سفارشی برای کنترل سخت افزار ربات
ایجاد توابع خواندن و نوشتن به H.W. رابط
پیکربندی و راه اندازی پرونده ها
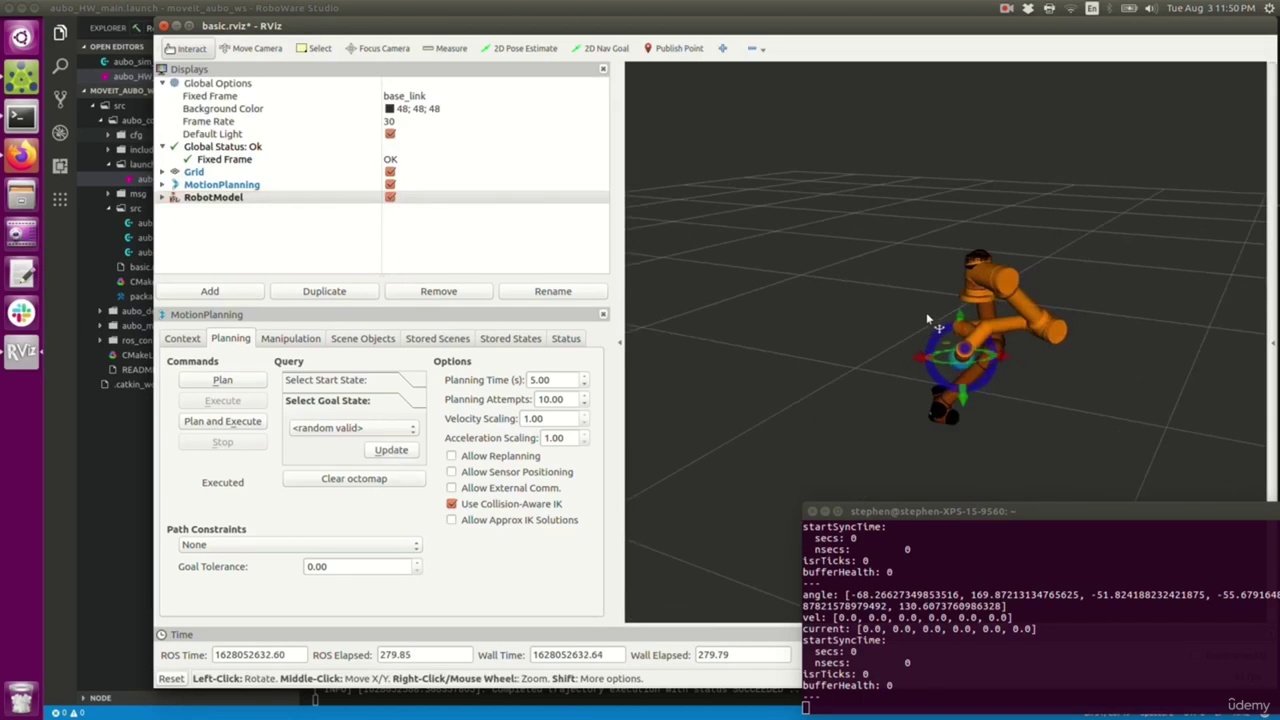
تنظیم RVIZ برای Moveit
اصلاح رابط H.W برای ربات واقعی:
نسخه ی نمایشی رابط سخت افزار
بافر برای ثبات ارتباطات
پیکربندی سرعت برای استقرار روبات واقعی
Complete Guide: Making a hardware interface for MoveIt
در این روش نیاز به افزودن محصول به سبد خرید و تکمیل اطلاعات نیست و شما پس از وارد کردن ایمیل خود و طی کردن مراحل پرداخت لینک های دریافت محصولات را در ایمیل خود دریافت خواهید کرد.

اطلاع رسانی حذف دوره های قدیمی و تخفیفات نوروزی مشاهده
 1")
 2")
 3")
 4")
 5")
 6")
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}