در حال حاضر محصولی در سبد خرید شما وجود ندارد.

یادگیری OpenCV ، Keras ، Object و Lane و طبقه بندی علائم ترافیک برای اتومبیل های خودران
عنوان اصلی : Autonomous Cars: Deep Learning and Computer Vision in Python 2022
سرفصل های دوره :
تنظیم و نصب محیط:
محیط خود را با تشخیص لبه بلادرنگ در یک نوت بوک Jupyter آزمایش کنید
Udemy 101: بیشترین بهره را از این دوره ببرید
معرفی خودروهای خودران:
تاریخچه مختصر وسایل نقلیه خودران
بررسی اجمالی دوره و نتایج یادگیری
دوره سقوط پایتون [اختیاری]:
مبانی پایتون: فضای خالی، واردات و فهرست
مبانی پایتون: تاپل ها و دیکشنری ها
مبانی پایتون: توابع و عملیات بولی
مبانی پایتون: حلقه زدن و یک تمرین
معرفی پانداها
مقدمه ای بر MatPlotLib
مبانی بینایی کامپیوتر: قسمت 1:
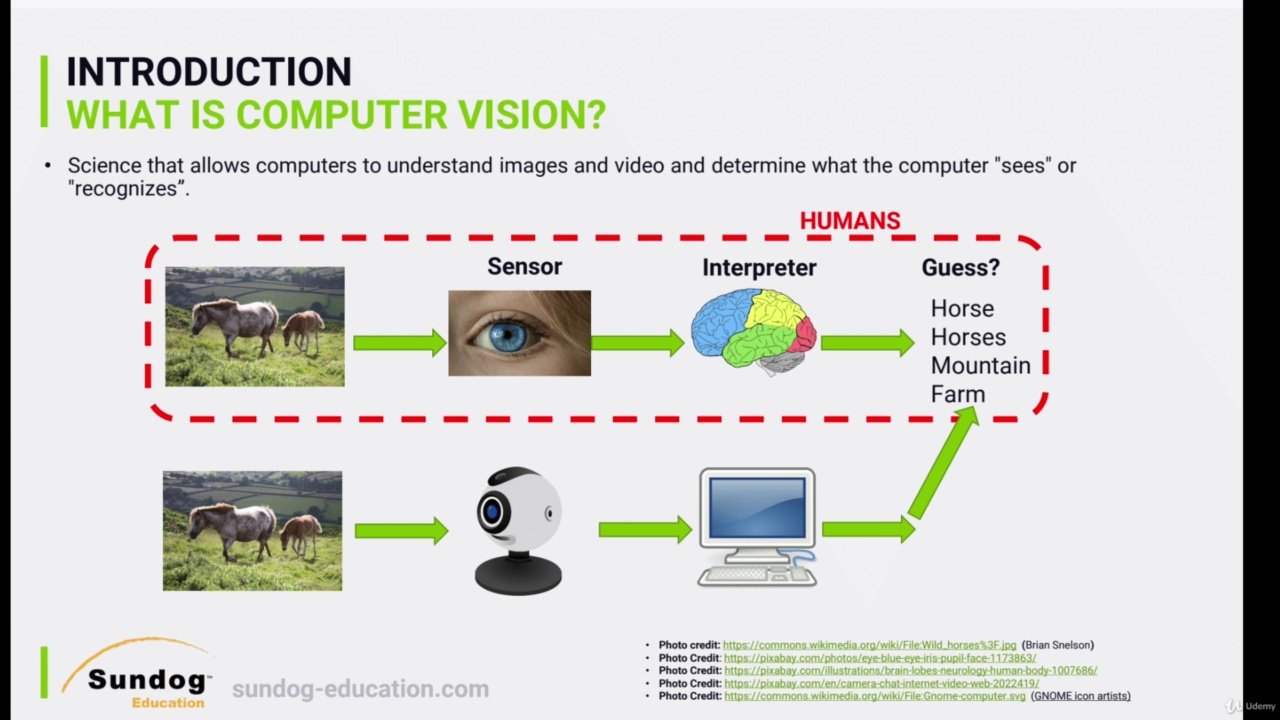
سیستم بینایی انسان در مقابل کامپیوتر
تصویر چیست و چگونه به صورت دیجیتالی ذخیره می شود؟
[Activity] تصویر رنگی را مشاهده کنید و RGB را به خاکستری تبدیل کنید
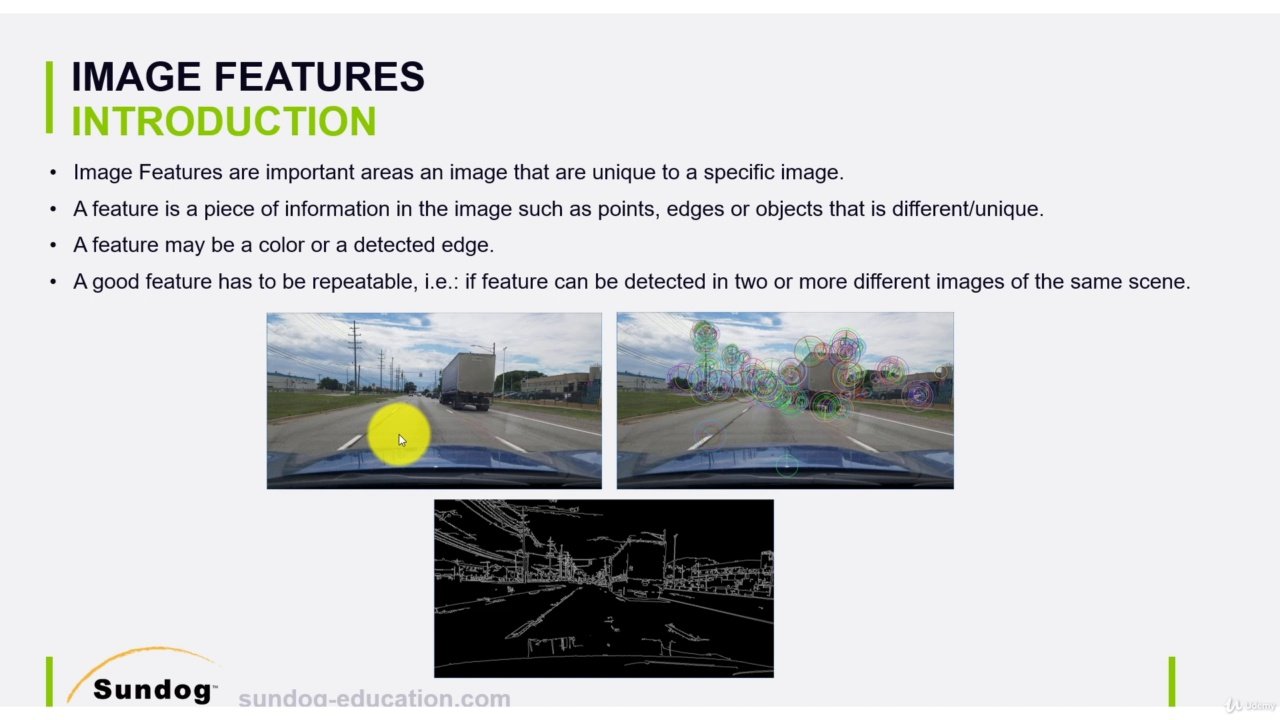
[فعالیت] خطوط خطوط را در تصویر مقیاس خاکستری تشخیص دهید
[فعالیت] تشخیص خطوط خطوط در تصویر رنگی
چالش های تکنیک انتخاب رنگ چیست؟
فضاهای رنگی
[فعالیت] تبدیل فضای رنگی RGB به HSV و ادغام/تقسیم کانال ها
پیچیدگی - تیز کردن و محو کردن
[فعالیت] پیچیدگی - تیز کردن و تار کردن
تشخیص لبه و محاسبات گرادیان (Sobel، Laplace و Canny)
[فعالیت] تشخیص لبه و محاسبه گرادیان (Sobel، Laplace و Canny)
[فعالیت] پروژه شماره 1: Canny Sobel و Laplace Edge Detection با استفاده از وب کم
مبانی بینایی کامپیوتر: قسمت 2:
[Activity] کد برای انجام چرخش، ترجمه و تغییر اندازه
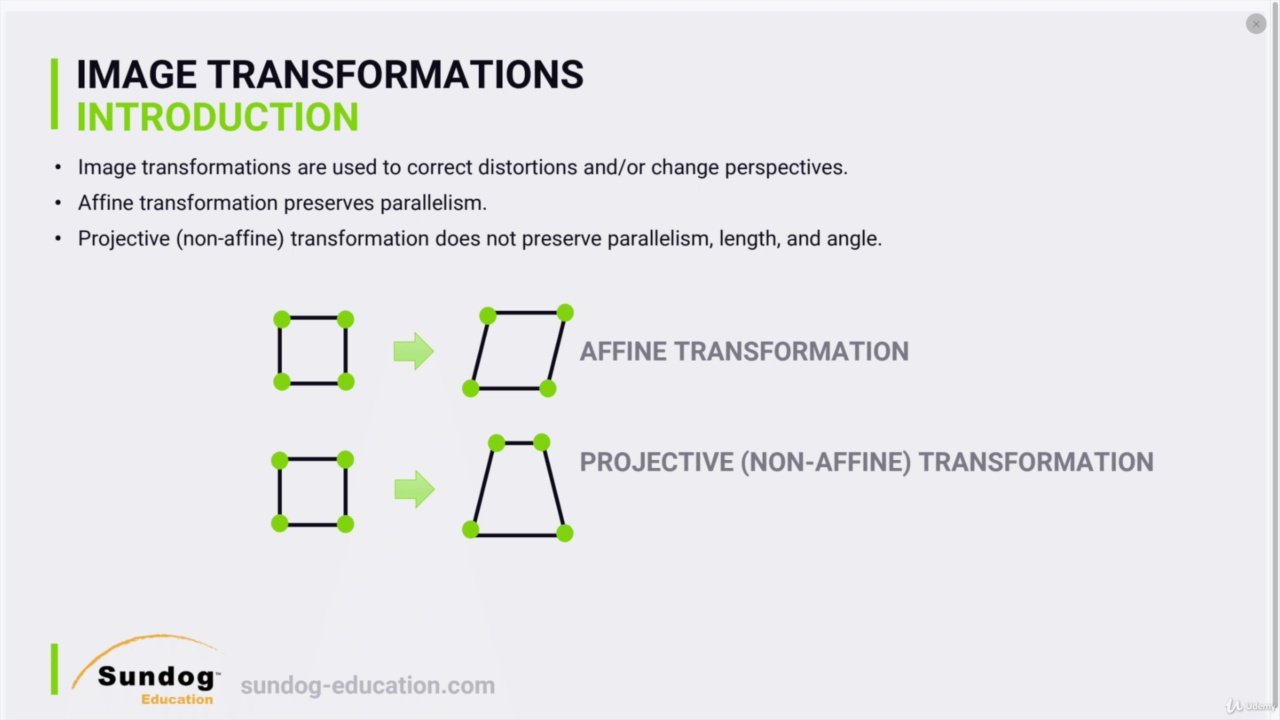
تغییر تصویر - تبدیل پرسپکتیو
[فعالیت] تغییر شکل تصویر غیر وابسته را روی یک تصویر علائم راهنمایی و رانندگی انجام دهید
تست و فرسایش برش تصویر
کد [Activity] برای انجام اتساع و فرسایش برش تصویر
پوشش منطقه مورد علاقه
کد [Activity] برای تعریف منطقه مورد نظر
نظریه تبدیل هاف
[فعالیت] تبدیل Hough - مثال عملی در پایتون
راه حل پروژه: تبدیل Hough برای تشخیص خطوط خط در یک تصویر
مبانی بینایی کامپیوتر: قسمت 3:
[فعالیت] یک کامیون را در یک تصویر به صورت دستی پیدا کنید!
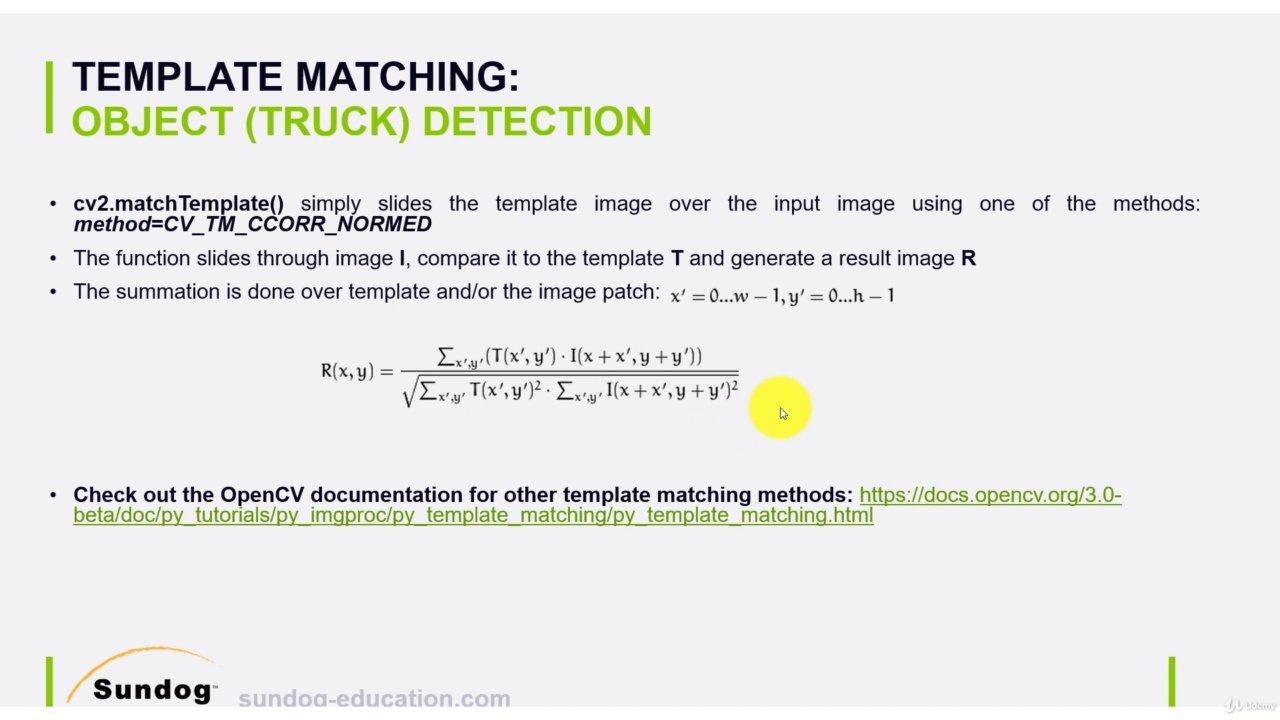
تطبیق الگو - یک کامیون پیدا کنید
[فعالیت] راه حل پروژه: با استفاده از تطبیق الگو، یک کامیون پیدا کنید
تشخیص گوشه - هریس
کد [Activity] برای انجام تشخیص گوشه
مقیاسسازی تصویر - هرمی بالا/پایین
کد [Activity] برای اجرای هرم تصویر
هیستوگرام رنگها
کد [Activity] برای بدست آوردن هیستوگرام رنگی
هیستوگرام گرادیان های جهت دار (HOG)
کد [Activity] برای انجام استخراج ویژگی HOG
استخراج ویژگی - SIFT، SURF، FAST و ORB
[فعالیت] استخراج ویژگی FAST/ORB در OpenCV
یادگیری ماشین: قسمت 1:
ارزیابی سیستم های یادگیری ماشین با اعتبارسنجی متقابل
رگرسیون خطی
[فعالیت] رگرسیون خطی در عمل
رگرسیون لجستیک
درختان تصمیم و جنگل های تصادفی
[فعالیت] درختان تصمیم در عمل
یادگیری ماشین: قسمت 2:
قضیه بیز و بیز ساده لوح
[فعالیت] ساده لوح بیز در عمل
[Activity] پشتیبانی از طبقهبندیکنندههای برداری در عمل
راه حل پروژه: تشخیص اتومبیل ها با استفاده از SVM - قسمت شماره 1
[فعالیت] تشخیص اتومبیل ها با استفاده از SVM - قسمت شماره 2
[فعالیت] راهحل پروژه: شناسایی اتومبیلها با استفاده از SVM - قسمت #3
شبکه های عصبی مصنوعی:
مدل پرسپترون تک نورون
توابع فعال سازی
تقسیم ANN آموزش و مجموعه داده
مثال عملی - تعیین سرعت خودرو
کد ساخت پرسپترون برای طبقه بندی باینری
آموزش پس انتشار
کدی برای آموزش پرسپترون برای طبقه بندی باینری
پرسپترون ANN دو و چند لایه
مثال 1 - ساخت پرسپترون چند لایه برای طبقه بندی باینری
مثال 2 - ساخت پرسپترون چند لایه برای طبقه بندی باینری
یادگیری عمیق و تنسورفلو: قسمت 1:
ساخت شبکه های عصبی عمیق با Keras، عادی سازی و رمزگذاری یک داغ.
[فعالیت] ساخت یک طبقه بندی لجستیک با یادگیری عمیق و Keras
فعال سازی ReLU و جلوگیری از تطبیق بیش از حد با منظم کردن خروج
[فعالیت] بهبود طبقهبندیکننده ما با نظمدهی حذف
یادگیری عمیق و تنسورفلو: قسمت 2:
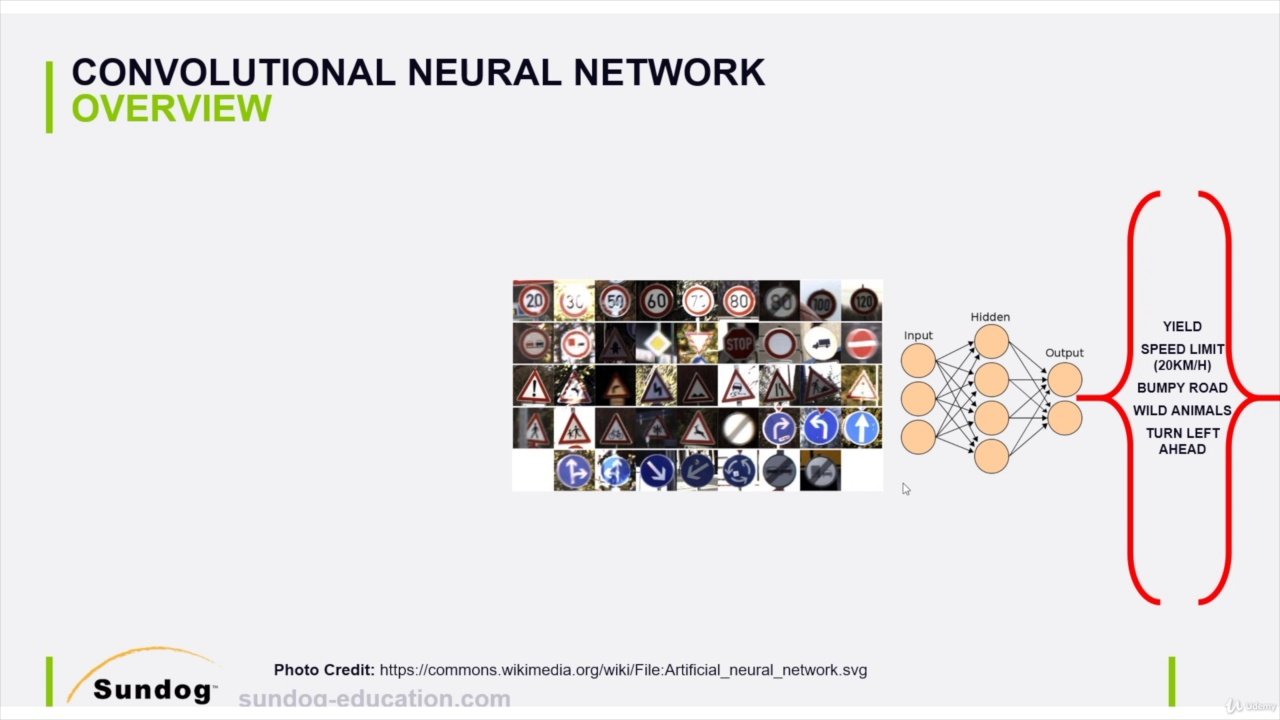
شبکه های عصبی کانولوشن (CNN)
اجرای CNN در کراس
[فعالیت] طبقه بندی تصاویر با یک CNN ساده، قسمت 1
[فعالیت] طبقه بندی تصاویر با یک CNN ساده، قسمت 2
Max Pooling
[فعالیت] بهبود توپولوژی CNN ما و با Max Pooling
[فعالیت] یک CNN برای طبقه بندی علائم راهنمایی بسازید
[فعالیت] ساخت CNN برای طبقه بندی علائم راهنمایی و رانندگی - قسمت 2
پایان دادن:
سخنرانی پاداش: دوره های بیشتری برای کشف!
Autonomous Cars: Deep Learning and Computer Vision in Python 2022
در این روش نیاز به افزودن محصول به سبد خرید و تکمیل اطلاعات نیست و شما پس از وارد کردن ایمیل خود و طی کردن مراحل پرداخت لینک های دریافت محصولات را در ایمیل خود دریافت خواهید کرد.


Online Bookkeeping, VAT and Payroll Training

Business Idioms for Powerful Communication

Build Product Management deliverable portfolio using ChatGPT
تاریخ اقتصادی جهان از سال 1400

لذت علم

Data modeling and Relational database design

ایجاد فیلم های ساده در خانه

درک محاسبات چند متغیره: مشکلات، راه حل ها و راهنمایی ها

Tech Service Firms Course: Intrapreneurship in Technology

ادبیات عرفانی کتاب مقدس ( انجیل های مسیحیان )






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}